Available only if at least one **Robot Dog** Mission Unit is configured, a **Profile** is set up and access permissions to the **App** are granted.
--- ### Create a new mission **1.** From the main page, open the project where you want to create the mission. **2.** From the left-side menu, go to the **Inventory** section.  **3.** Click on the **Missions** Object Class to view the list of missions. **4.** Click on **New object**.  **5.** A mission creation modal will open, asking you to input the following details: - **Name** The identifying name of the mission. - **Mission unit type** Select **Robot Dog** from the list. - **Start Mode** Choose how the mission should start: - **Manual**, with a specific command, or - **Scheduled**, indicating the mission start date. - **Mission Typology** Defines the operational mode of the mission. You can choose from: - **Autonomous:** Robot Dog runs the mission autonomously, following the path and actions configured for the mission. - **Discovery:** An exploratory mission to acquire data without a predefined path. - **Mission Unit** Select the Robot Dog that will execute this mission. - **Profile** Select a profile for the mission. This field will become active only after selecting the Mission Unit. **6.** To create the mission, click **Save**. --- ### Editing missions You can **edit** and **delete** missions in the inventory, in the **mission list**. #### Edit To edit a mission that hasn't been completed yet, **open the details** by clicking the blue button that appears when you hover over the item. To update the mission details, click **Edit**. 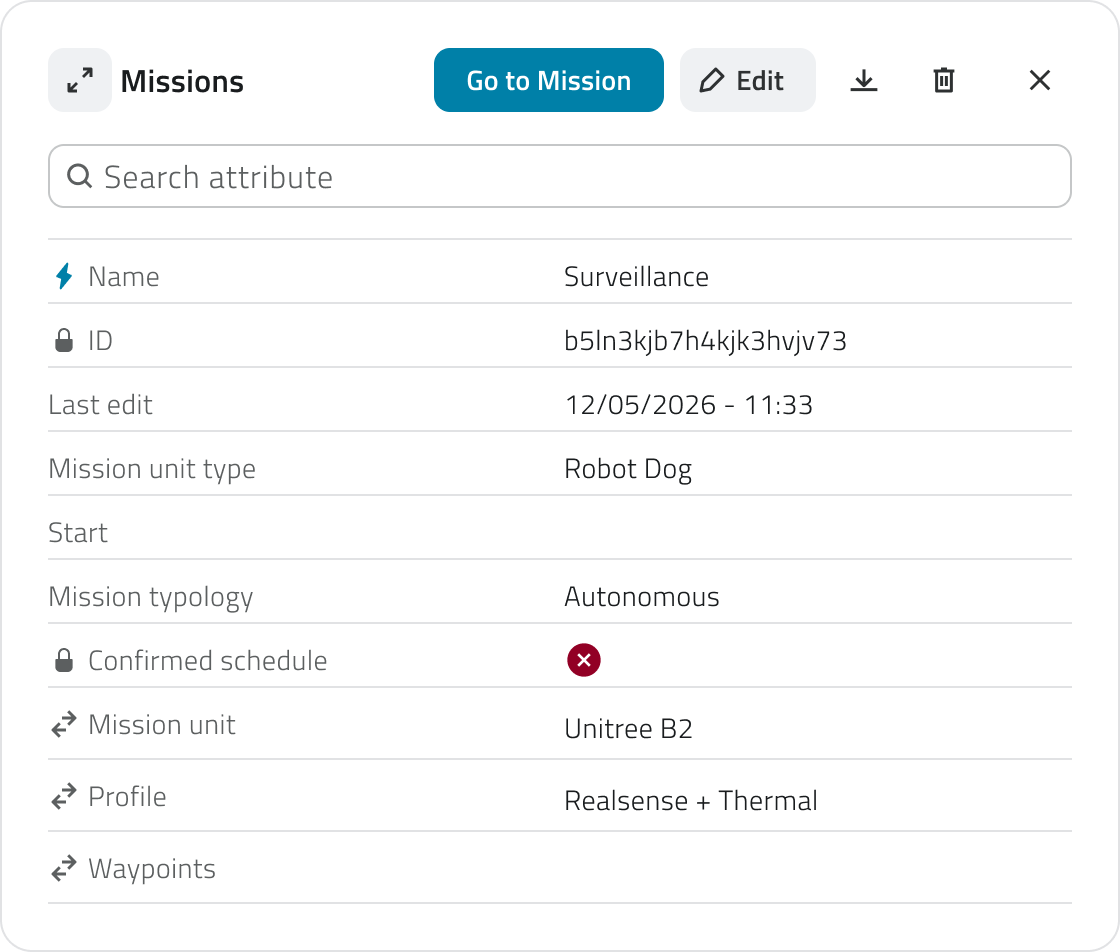Some attributes can be edited, depending on the **mission’s status** and **whether there are any waypoints**.
#### Delete To delete a mission: - **Open the mission details** and click the **Delete** button in the top-right corner of the window. - **Select one or more missions** from the list and click the **Delete** button in the top-right corner of the view. 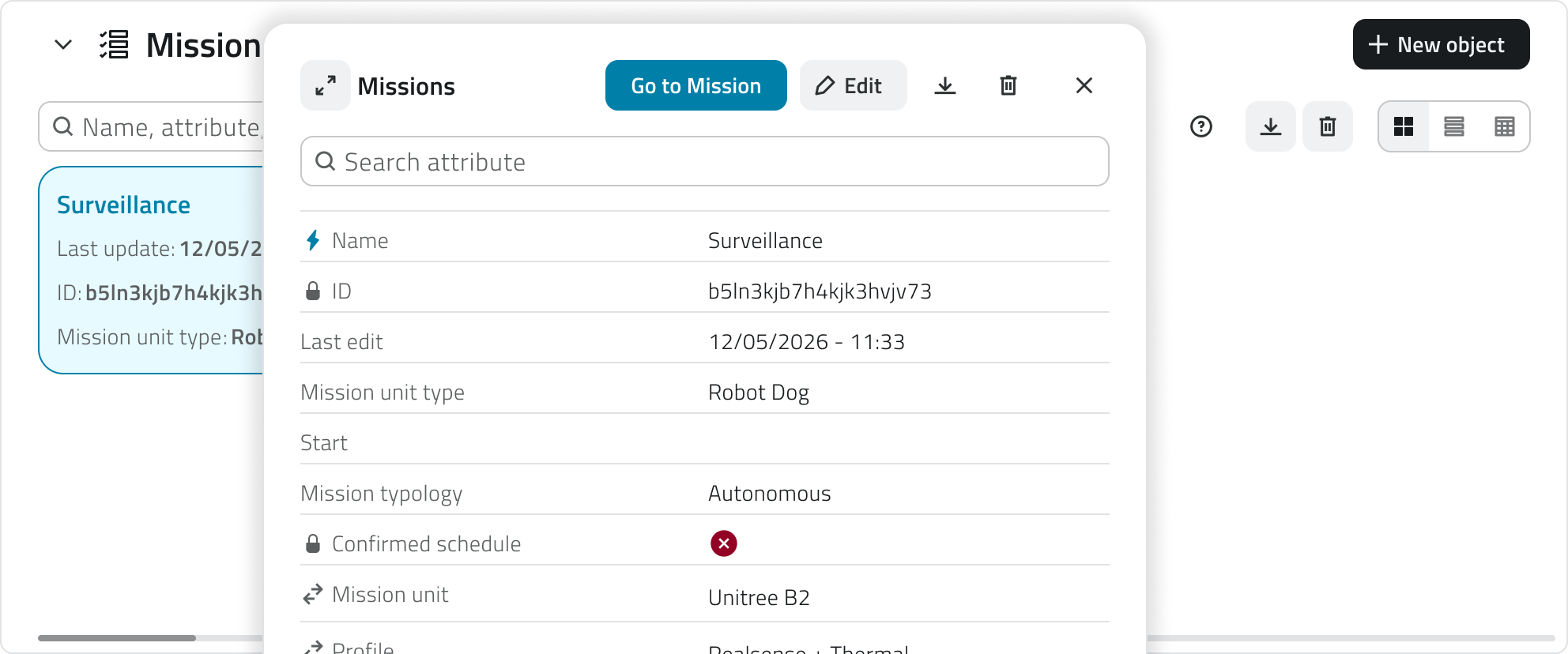 In both cases, a confirmation window will appear for the operation. **Deletion is only allowed** for **missions that have not been started**. Archived missions cannot be deleted, but can only be viewed or duplicated.
--- ### Adding elements to the map To make a mission operational, you must define a **Mission Home** and **at least one Waypoint**. You can also draw **Danger Zones** and **Geofences**. To add them, click **Go to Mission** from the mission details panel. #### Adding Danger Zones and Geofences Danger Zones and Geofences are areas that **limit the Robot Dog's operational area**. - **Danger Zone** Represents an area that the Robot Dog cannot enter. - **Geofence** Represents an area where the Robot Dog can operate safely. The robot can leave this area, but you will be notified if it does. **To add a Danger Zone or a Geofence**, select the **Draw** tool from the toolbar and choose the corresponding Object Class. 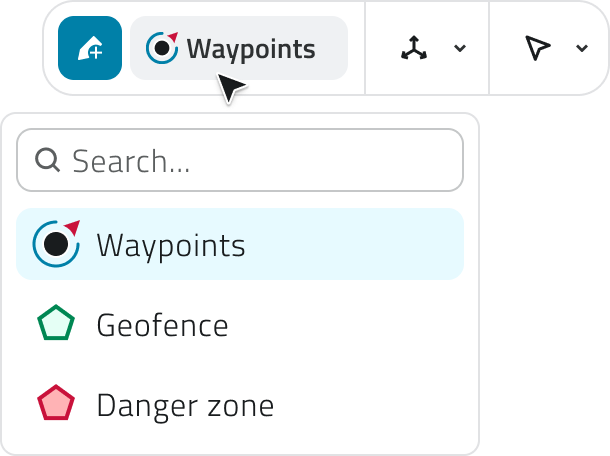 **To draw the polygon**, place the vertices by **left-clicking** on the map. Close the polygon by **right-clicking**. **Fill in the required attributes** and click **Save**. 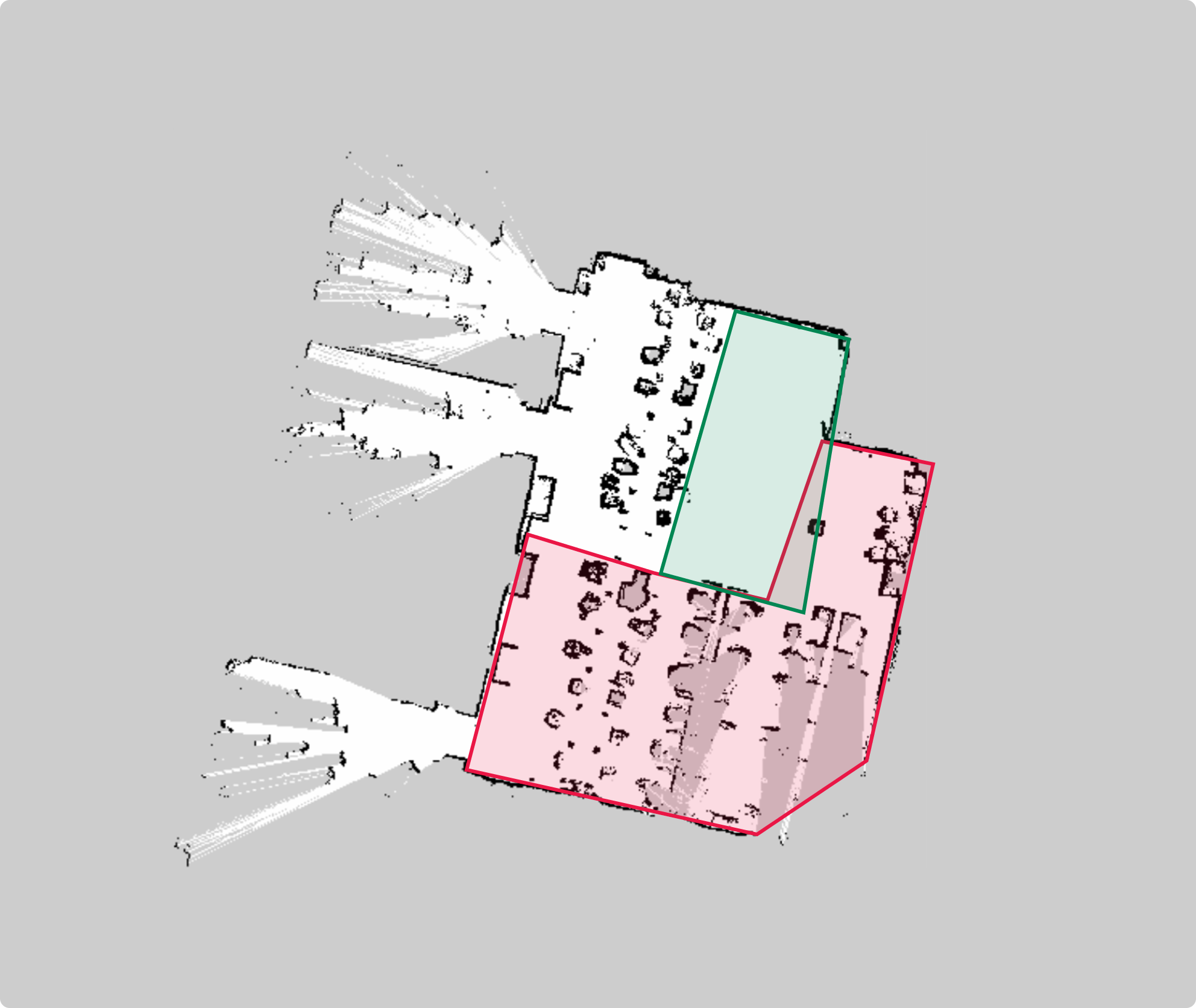 #### Set the Mission Home The Mission Home is the Robot Dog’s **starting and return point**. It is not drawn manually on the map, but is automatically detected by the system based on the robot’s location.Before setting the Home, make sure the **Robot Dog is turned on** and **placed on the charging station**.
From the side panel, click **Mark on map**. 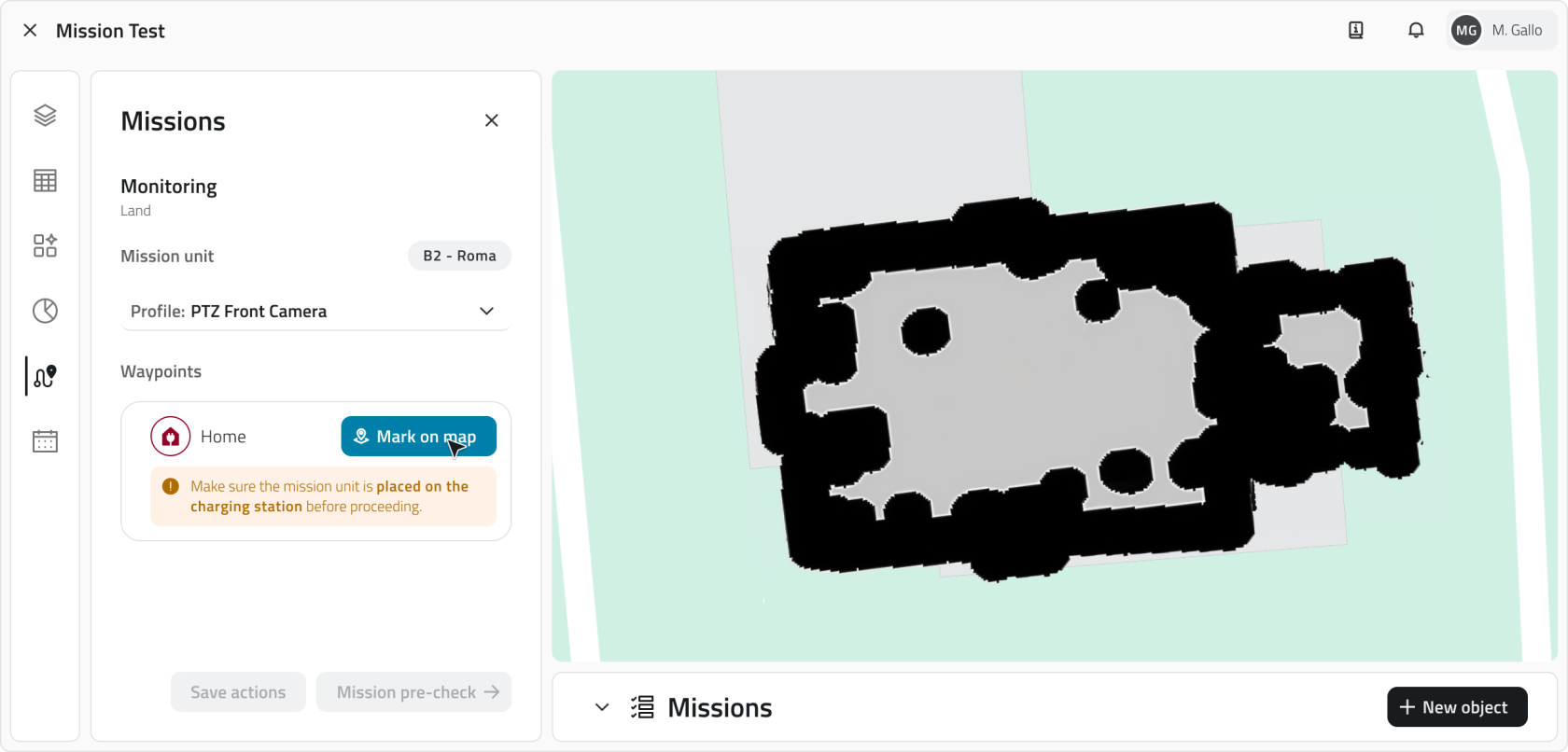 The system **records the robot's current position** and **saves it as the Mission Home**. **To change the Home**, delete the existing one and click **Mark on map** again.You can set the Home within a Danger Zone, but this will be considered a **fatal error during** verification.
#### Add Waypoints to the Map Waypoints define the **operational path** that the Robot Dog will follow during the mission. **1. To add a Waypoint**, select the **Draw** tool from the toolbar and choose the corresponding Object Class.  **2. Place the waypoint** by **left-clicking** on the map. **3.** To set the **waypoint’s orientation, move** the mouse**.** **4.** Confirm the entry by **right-clicking.** You can place waypoints within a danger zone, but they will be **excluded from the robot's path** during verification.
Waypoints are **visible both on the map** and in **the list in the side panel**. Each Waypoint is **automatically numbered** based on the order in which it was created. The order of the Waypoints also determines the order in which the Robot Dog will reach them. **To change the orientation**, select a waypoint on the map and click **Rotate** from the **toolbar**. **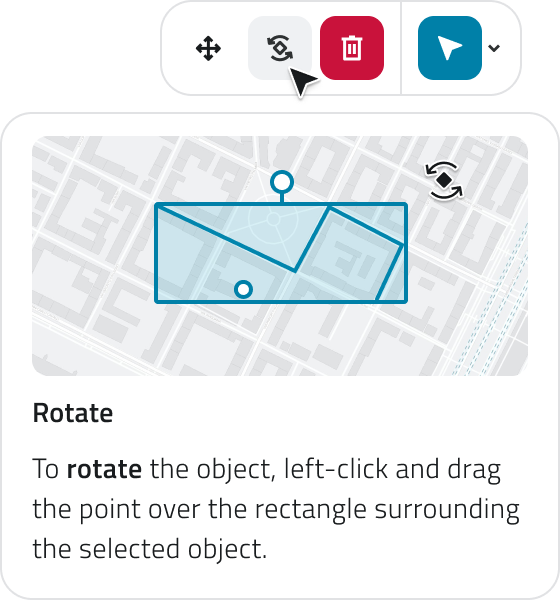** **To delete waypoints**, select them on the map and click **Delete** on the **toolbar**, or click **Delete** when you hover over the item in the list. **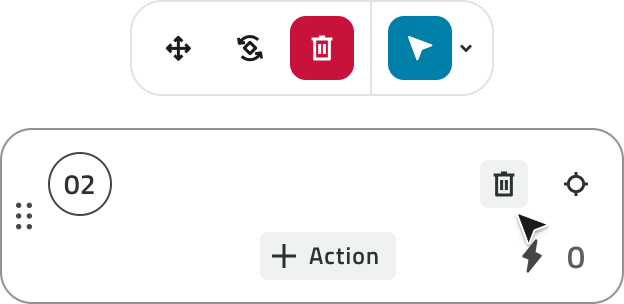** **To change the order** of the waypoints, **drag them** in the sidebar list.If you **change** the **order** or **settings** of the waypoints after saving them, a warning about unsaved changes will be displayed. Remember to click **Save** at the bottom of the panel.
--- ### Set actions on Waypoint For each Waypoint, it is possible to c**onfigure one or more actions** that the Robot Dog will perform after reaching the point. The actions define what operation the robot should perform, using a specific Add-on or for a defined duration. **To add an action** to a Waypoint, hover over one of the action cards on the left-hand panel and click the **+Action** button.The list of available actions **may vary based on the Add-on in use.** For example, if the profile used **does not** have a camera, the action *Take photo* **will not be** available.
For **photo acquisition actions**, you can associate one or more **AI models**, which will be **executed automatically** after collecting the content. 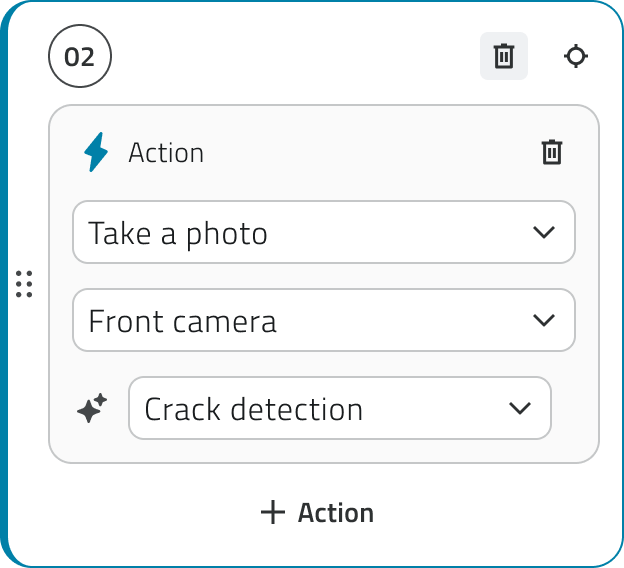 At the end of the mission, the following are displayed: - **Original media** - **Processed media** from the selected AI models For each waypoint, you can add **multiple actions**, but it is also possible to save **without setting any actions**. The actions are **executed in sequence**, in the order in which they were created and are visible in the list. To save the waypoint configuration and actions, click the **Save** button at the bottom. --- ### Mission pre-check Before starting the mission, a pre-check must be performed. Clicking on **Mission pre-check**, the system will verify the **connection status of the Robot Dog** and the **position of the Home and Waypoints**. The system may detect the following types of errors: **Blocking errors** Related to the Mission Unit or Home. In this case, the mission cannot be started until the issue is resolved. **Non-blocking errors** Related to the Add-on or individual Waypoint. In this case, the mission can still be started, but the system requires you to sign a waiver before proceeding. 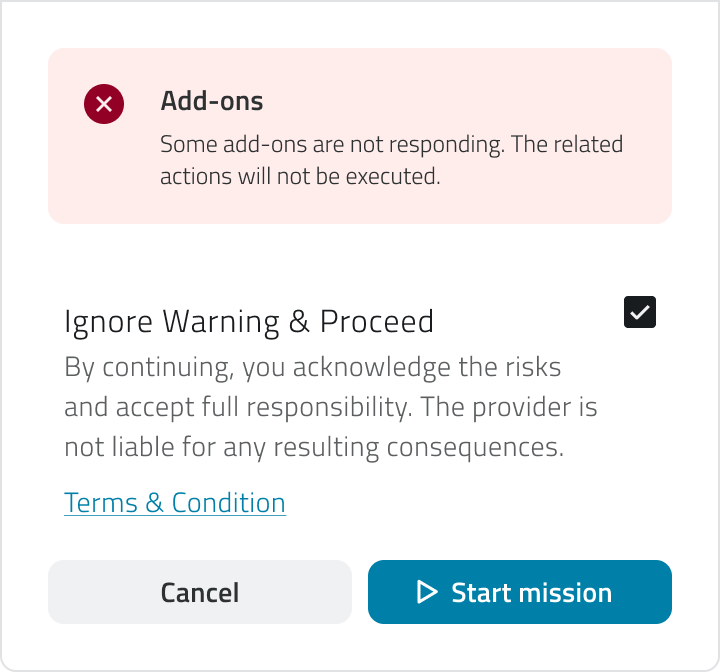**Every time you reopen the mission**, the Robot Dog’s connection status will be **automatically checked**. In addition, the **Home** point must be **reset** each time, and the Mission pre-check must be performed again.
--- ### Mission start If the check did not present any blocking errors, you can start the mission by clicking the **Start mission** button.  Upon start, the Robot Dog autonomously begins to execute the path and actions configured for the mission. From this moment, it is possible to monitor the [*mission in real-time and intervene using the available controls*](https://wiki.eaglearca.com/books/mission-planner-wR9/page/robot-dog-tracking-a-live-mission "Robot Dog - Tracking a live mission"). --- ### Links - [Initial Setup](https://wiki.eaglearca.com/books/mission-planner-wR9/page/initial-setup "Initial Setup") - [Archived Missions](https://wiki.eaglearca.com/books/mission-planner-wR9/page/archived-missions "Archived Missions") ---  **Italian version** Questa sezione descrive i passaggi per creare, configurare e avviare una missione con un Robot Dog, dalla creazione della missione fino al controllo preliminare e all’avvio.Disponibile solo con almeno una Mission Unit **Robot Dog** configurata, un **Profilo** configurato e permessi di accesso all'**App**.
--- ### Creare una nuova missione **1.** Dalla pagina principale dei progetti, apri il progetto in cui vuoi creare la missione. **2.** Dal menu laterale sinistro, accedi alla sezione **Inventory**.  **3.** Clicca sulla Classe Oggetto **Missions** per visualizzare l'elenco delle missioni. **4.** Clicca su **Nuovo oggetto.**  **5.** Si aprirà il modale di creazione missione, che richiede l'inserimento dei seguenti dati: - **Nome** Il nome identificativo della missione. - **Mission unit type** Seleziona **Robot Dog** dall'elenco. - **Start Mode** Scegli se la missione deve partire: - **Manualmente**, con un comando specifico. - **In** **modalità programmata**, indicando la **data di inizio della missione**. - **Mission Typology** Definisce la modalità operativa della missione. Puoi scegliere tra: - **Autonomous:** Il Robot Dog esegue la missione autonomamente, seguendo il percorso e le azioni che verranno configurati nei passaggi successivi. - **Discovery:** Missione esplorativa utilizzata per acquisire dati senza un percorso predefinito. - **Mission Unit** Seleziona il Robot Dog che dovrà eseguire questa missione. - **Profile** Seleziona il profilo per la missione. Questo campo diventa attivo solo dopo aver selezionato la Mission Unit. **6.** Per creare la missione, clicca **Salva** --- ### Modifica delle missioni Puoi **modificare** ed **eliminare** le missioni nell'inventory, nella **lista delle missioni**. #### Modifica Per modificare una missione non ancora eseguita, **apri il dettaglio** cliccando sul pulsante blu, visibile al passaggio del mouse sull'elemento. Per aggiornare i dati della missione, clicca **Modifica**. Alcuni attributi possono essere modificati, a seconda dello **stato della missione** e della **presenza di Waypoint**.
#### Eliminazione Per eliminare una missione: - **Apri il dettaglio** della missione e clicca sul pulsante **Elimina** in alto a destra della finestra. - **Seleziona una o più missioni** dalla lista e clicca sul pulsante **Elimina** in alto a destra della vista.  In entrambi i casi, apparirà una finestra di conferma per l'operazione. L’**eliminazione è consentita** solo per le **missioni non avviate**. Le missioni archiviate non possono essere eliminate, ma solo consultate o duplicate.
--- ### Inserire elementi in mappa Per rendere una missione operativa, è necessario definire una **Mission Home** e **almeno un Waypoint.** È anche possibile disegnare aree di **Danger Zone** e **Geofence**. Per inserirli clicca **Go to Mission** dal pannello di dettaglio della missione. #### Aggiungere Danger Zones e Geofence Le Danger Zones e i Geofences sono zone che **limitano l'area operativa** del Robot Dog. - **Danger Zone** Rappresenta un'area nella quale il Robot Dog non può entrare. - **Geofence** Rappresenta un'area nella quale il Robot Dog può operare in modo sicuro. Il robot può uscire da quest'area, ma verrai notificato se lo farà. **Per aggiungere una Danger Zone o un Geofence**, seleziona lo strumento **Disegna** dalla toolbar e scegli la Classe Oggetto corrispondente.  **Per disegnare il poligono**, posiziona i vertici cliccando il **tasto sinistro del mouse** sulla mappa. Chiudi il poligono cliccando il **tasto destro del mouse**. **Compila gli attributi** richiesti e clicca su **Salva**.  #### Impostare la Mission Home La Mission Home rappresenta il **punto di partenza e di rientro** del Robot Dog. Non viene disegnata manualmente sulla mappa, ma viene rilevata automaticamente dal sistema in base alla posizione del robot.Prima di impostare la Home, assicurati che il **Robot Dog sia acceso** e **posizionato sulla stazione di ricarica**.
Dal pannello laterale, clicca **Segna posizione**.  Il sistema **registra la posizione** corrente del robot e **la salva come Mission Home**. **Per modificare la Home**, elimina quella esistente e clicca nuovamente **Segna posizione**.Puoi posizionare la Home all'interno di una Danger Zone, ma in fase di verifica sarà **considerato un errore bloccante**.
#### Aggiungere Waypoint in mappa I Waypoint definiscono il **percorso operativo** che il Robot Dog seguirà durante la missione. **1. Per aggiungere un Waypoint** seleziona lo strumento **Disegna** dalla toolbar e scegli la Classe Oggetto corrispondente.  **2. Posiziona il punto** cliccando con il **tasto sinistro del mouse** sulla mappa. **3.** Per definire **l’orientamento** **del Waypoint**, **muovi** il mouse. **4. Conferma l’inserimento** cliccando con il **tasto destro del mouse**. Puoi posizionare i Waypoint all'interno di una Danger Zone, ma in fase di verifica saranno **scartati dalla traiettoria del robot**.
I Waypoint sono **visibili sia in mappa** che nell'**elenco nel pannello laterale**. Ogni Waypoint viene **numerato automaticamente**, in base all'ordine di creazione. L'ordine dei Waypoint indica anche l'ordine in cui il Robot Dog li raggiungerà. **Per** **modificare l’orientamento** seleziona un Waypoint in mappa e clicca **Ruota** dalla **toolbar.** **** **Per eliminare i Waypoint** selezionali in mappa e clicca **Elimina** dalla **toolbar**, o clicca su **Elimina** che appare andando in hover sull'elemento dell'elenco**.** **** **Per cambiare l'ordine** dei Waypoint, **trascinali** nell'elenco del pannello laterale.Se **modifichi** l’**ordine** o le **impostazioni** dei waypoint dopo averli salvati, verrà visualizzato un avviso relativo a modifiche non salvate. Ricordati di premere **Salva** nella parte inferiore del pannello.
--- ### Impostare azioni sui Waypoint Per ogni Waypoint è possibile **configurare una o più azioni**, che il Robot Dog esegue dopo aver raggiunto il punto. Le azioni definiscono quale operazione deve eseguire il robot, utilizzando uno specifico Add-on oppure per una durata definita. **Per aggiungere un’azione** a un Waypoint, porta il cursore sopra una delle card azione nel pannello laterale sinistro e clicca sul pulsante **+Action**.La lista delle azioni disponibili **può variare in base agli Add-on in uso**. Ad esempio se nel profilo utilizzato **non** sono presenti fotocamere, **non** sarà possibile selezionare *Scatta foto* come azione.
Per le **azioni di acquisizione foto** è possibile associare uno o più **modelli AI**, che vengono **eseguiti automaticamente** dopo la raccolta del contenuto.  Al termine della missione vengono visualizzati: - **Media originale** - **Media elaborato** dai modelli AI selezionati Per ogni waypoint è possibile aggiungere **più azioni**, ma è anche possibile salvare senza aver impostato **alcuna azione**. Le azioni vengono **eseguite in sequenza**, nell’ordine in cui sono state create e in cui sono visibili nella lista. Per salvare la configurazione dei waypoint e delle azioni, clicca sul pulsante **Salva**, in basso. --- ### Controlli pre-missione Prima di avviare la missione è necessario effettuare un pre-check. Cliccando su **Controlli pre-missione** il sistema effettuerà una verifica sullo **stato di connessione del Robot dog** e sulla **posizione della Home e dei Waypoints.** Il sistema potrebbe rilevare le seguenti tipologie di errori: **Errori bloccanti** Riguardano Mission Unit o Home. In questo caso non sarà possibile avviare la missione finché il problema non viene risolto. **Errori non bloccanti** Riguardano Add-on o singoli Waypoint. In questo caso è comunque possibile avviare la missione, ma il sistema richiede uno scarico di responsabilità prima di procedere. **Ogni volta che riaprirai la missione**, verrà eseguito un **controllo automatico** sullo stato di connessione del Robot Dog. Inoltre, ogni volta la **Home** dovrà essere **reimpostata** e il Controllo pre-missione dovrà essere nuovamente effettuato.
--- ### Avvio della missione Se la verifica non ha presentato errori bloccanti, puoi avviare la missione cliccando il pulsante **Inizia la missione**.  All’avvio il Robot Dog parte in autonomia e inizia ad eseguire il percorso e le azioni configurate per la missione. Da questo momento è possibile monitorare la *[missione in tempo reale e intervenire tramite i controlli disponibili](https://wiki.eaglearca.com/books/mission-planner-wR9/page/robot-dog-tracking-a-live-mission "Robot Dog - Tracking a live mission")*. --- ### Collegamenti - [Configurazione iniziale](https://wiki.eaglearca.com/books/mission-planner-wR9/page/initial-setup "Initial Setup") - [Missioni Archiviate](https://wiki.eaglearca.com/books/mission-planner-wR9/page/archived-missions "Archived Missions") --- ***Last update:** 13 May 2026*