Robot Dog – Create and launch a mission
Questa sezione descrive i passaggi per creare, configurare e avviare una missione con un Robot Dog, dalla creazione della missione fino al controllo preliminare e all’avvio.
Disponibile solo con modulo modulo-mission-planner attivo nel progetto e Mission Unit di tipo Robot Dog configurata.
Requisiti
- Modulo attivo nel progetto:
modulo-mission-planner - Accesso al Frontoffice
- Mission Unit di tipo Robot Dog disponibile nel progetto
- Almeno un Profilo configurato
Creare una nuova missione
1. Apri il progetto in cui vuoi creare la missione.
2. Dalla barra laterale, apri la sezione Inventory.
![]()
3. Clicca sulla classe oggetto Mission per visualizzare la lista delle missioni.
4. Clicca su Nuovo oggetto
![]()
5. Si apre il modale di creazione missione, che guida nella configurazione iniziale.
Inserisci i dati richiesti:
-
Mission Name
Nome identificativo della missione. - Mission unit
Selezione della Mission Unit associata. -
Mission Type
Tipologia di missione.
Selezionando Land, il flusso viene automaticamente configurato per missioni con Robot Dog. -
Mission Typology
Definisce la modalità operativa della missione. È possibile scegliere tra:-
Autonomous – il Robot Dog esegue la missione in autonomia seguendo il percorso e le azioni che verranno configurati nei passaggi successivi.
-
Discovery – missione esplorativa utilizzata per acquisire dati senza un percorso predefinito.
-
- Clicca Save per creare la missione
Gestire una missione (modifica ed eliminazione)
Le operazioni di modifica ed eliminazione sono disponibili dalla lista delle missioni.
-
Apri Inventory → Missions.
-
Seleziona la missione desiderata.
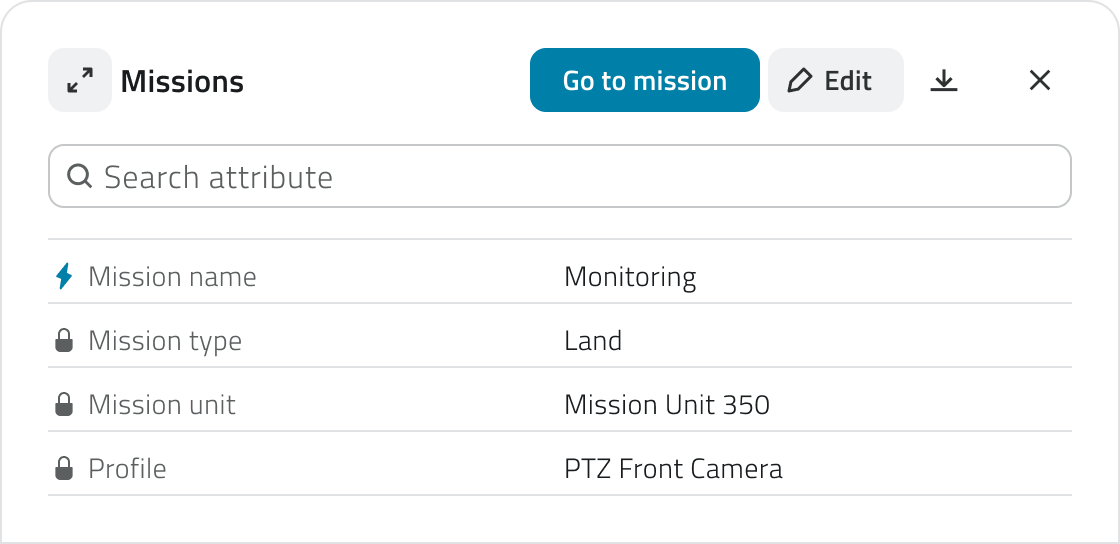
Modificare una missione
Clicca Edit per aggiornare i dati della missione.
È possibile modificare:
-
Nome della missione
-
Mission Unit associata (se compatibile)
-
Altri attributi non bloccati dallo stato della missione.
Se una missione include almeno un Waypoint, dal pannello Attributi non è più possibile modificare Mission Type, Mission Unit o Profile.
Eliminare una missione
Seleziona la missione desiderata dall’elenco, quindi clicca sul bottone Elimina e conferma l’operazione nel modale che appare.

L’eliminazione è consentita solo per le missioni non avviate.
Le missioni archiviate non possono essere eliminate, ma solo consultate o duplicate.
Inserire Home e Waypoint in mappa
Per rendere una missione valida e avviabile, è necessario definire:
- una Mission Home
- almeno un Waypoint
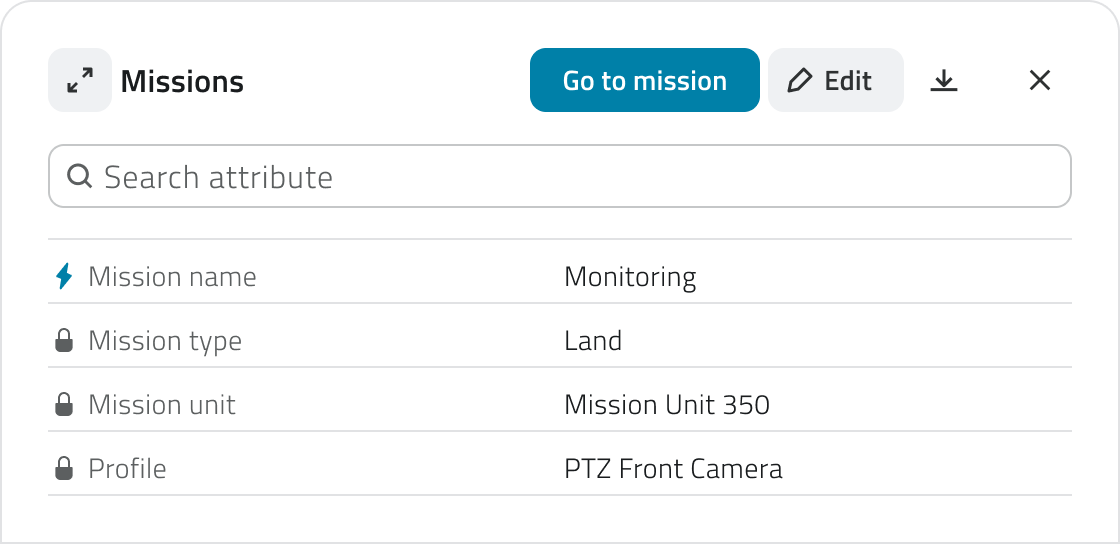
Apri Inventory → Missions, seleziona la missione e, dal pannello di dettaglio, clicca Go to Mission.
Impostare la Mission Home
La Mission Home rappresenta il punto di partenza e di rientro del Robot Dog.
Non viene disegnata manualmente sulla mappa, ma viene rilevata automaticamente dal sistema in base alla posizione del robot.
Per impostare la Home:
1. Assicurati che il Robot Dog sia acceso e posizionato sulla charging station.
2. Dal pannello laterale, clicca Mark on map.
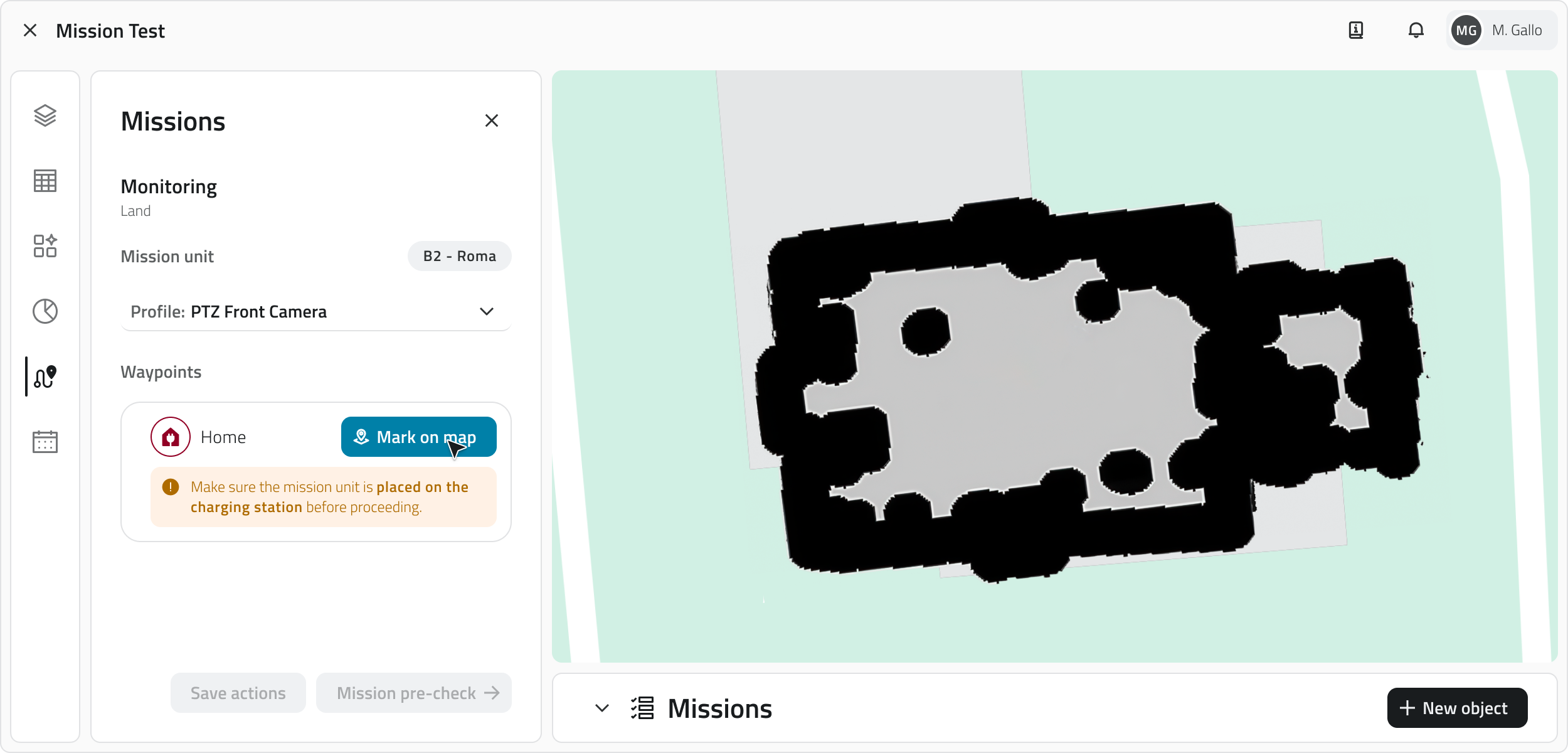
3. Il sistema registra la posizione corrente del robot e la salva come Mission Home.
Per modificare la Home, elimina quella esistente e clicca nuovamente Mark on map.
Aggiungere Waypoint in mappa
I Waypoint definiscono il percorso operativo che il Robot Dog seguirà durante la missione.
Per aggiungere un Waypoint:
1. Seleziona lo strumento Disegna dalla toolbar.
2. Clicca sulla mappa per posizionare il punto.
3. Muovi il mouse per definire l’orientamento del Waypoint.
4. Clicca con il tasto destro del mouse per confermare l’inserimento.
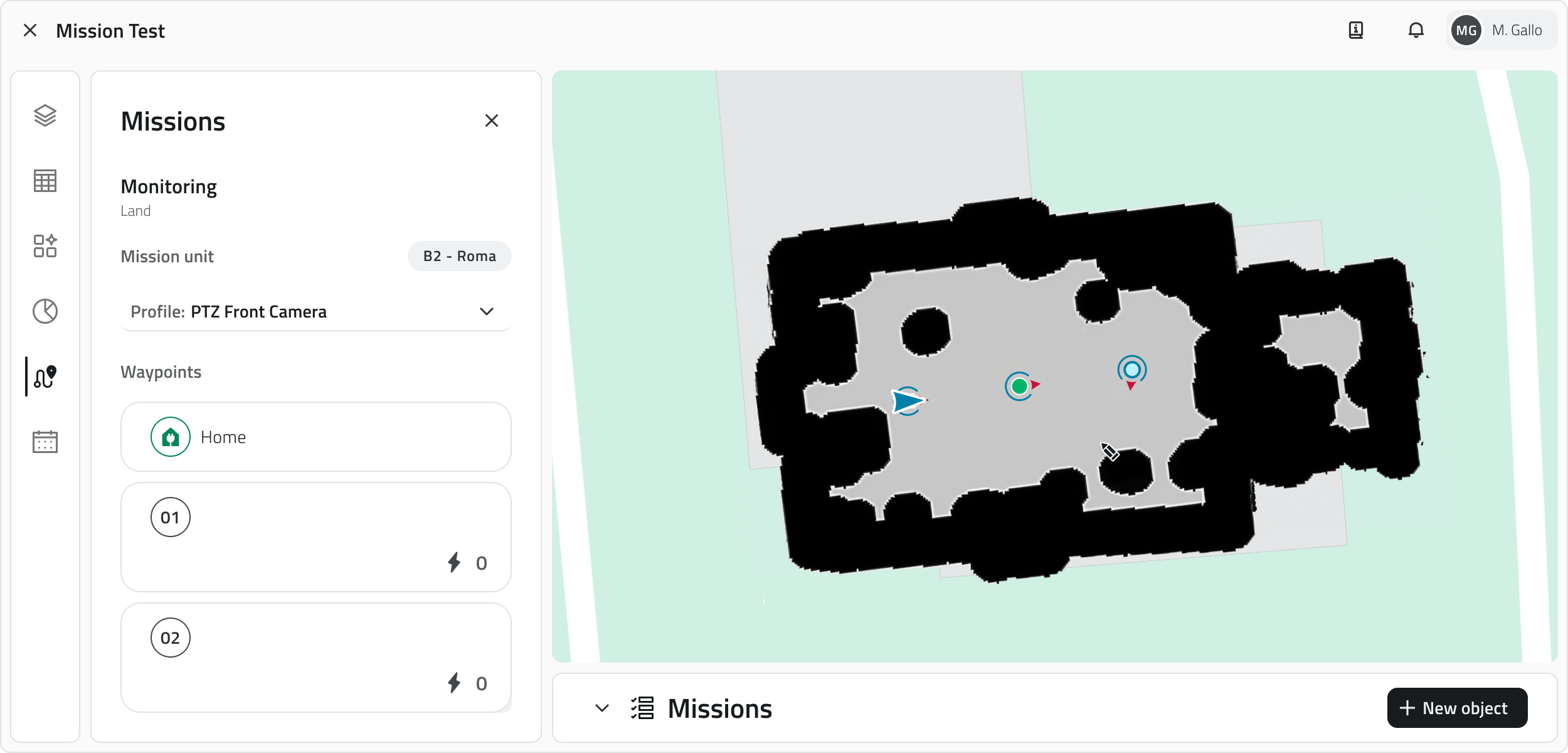
Ogni Waypoint:
- Viene numerato automaticamente
- Appare sia in mappa che nel pannello laterale
- Può essere riordinato tramite drag & drop dal pannello laterale
È inoltre possibile:
- Modificare l’orientamento selezionando il Waypoint e usando lo strumento Rotate
- Eliminare un Waypoint dal pannello laterale o direttamente dalla mappa
Impostare azioni sui Waypoint

Logica delle azioni
- Le azioni sono associate a un singolo Waypoint.
- Vengono eseguite in sequenza, nell’ordine configurato.
- Un Waypoint può non avere azioni associate.
- Le modifiche diventano effettive solo dopo aver cliccato Save.
Tipologie di azioni disponibili
- Take Photo
Acquisisce un’immagine tramite l’Add-on selezionato. - Start Video / Stop Video
Avvia o interrompe una registrazione video. - Wait
Mantiene il robot in attesa per un intervallo di tempo definito.
Per le azioni di acquisizione media è possibile associare uno o più modelli AI, che vengono eseguiti automaticamente dopo la raccolta del contenuto.

Al termine della missione vengono visualizzati:
-
Media originale
-
Media elaborato dai modelli AI selezionati
Mission Control e avvio della missione
Dopo aver configurato Mission Home, Waypoint e azioni, la missione può essere verificata e avviata.
Apri Inventory → Missions, seleziona la missione con doppio clic e clicca Go to Mission.
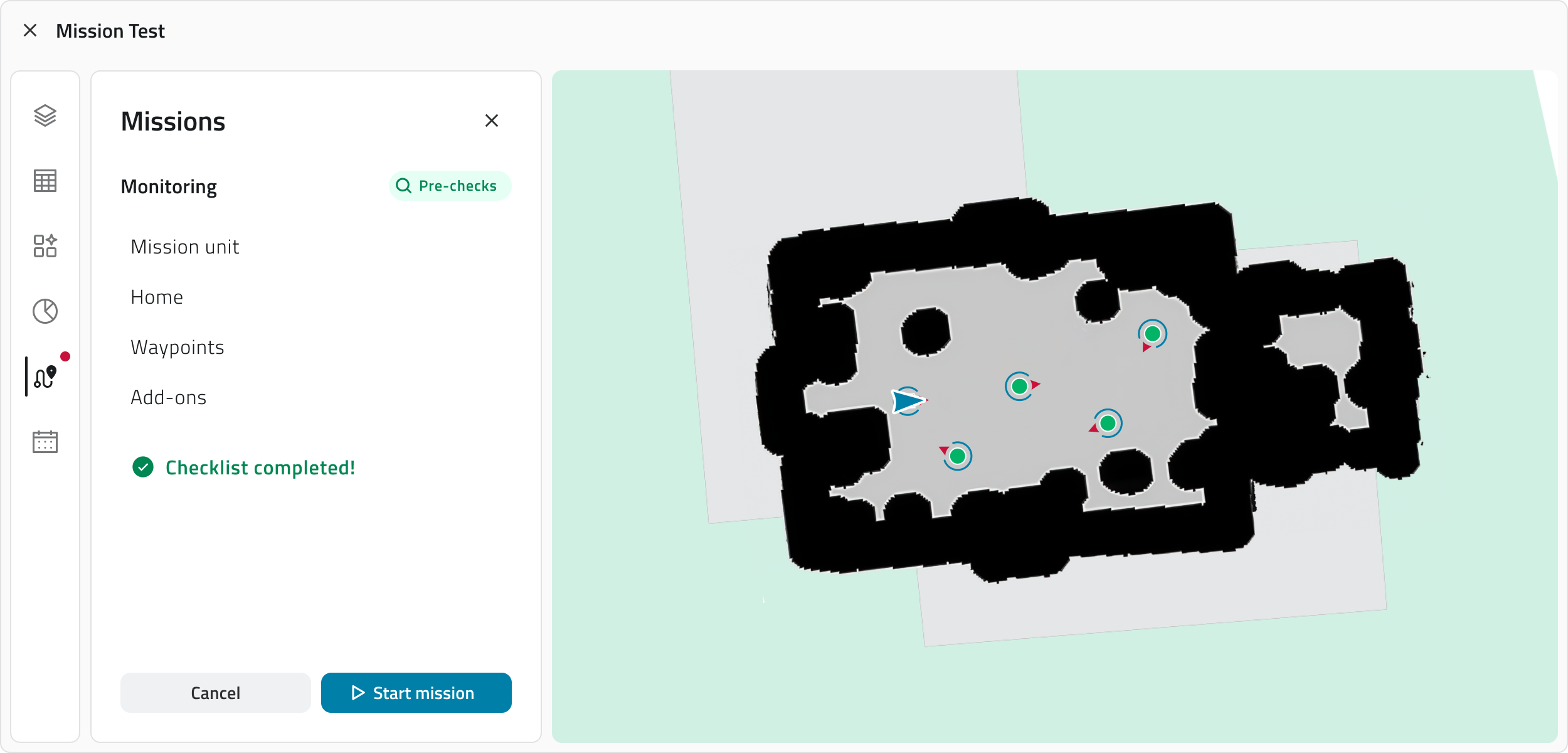
Mission Control
All’apertura, il sistema esegue il Mission Control, che verifica:
- Mission Unit (disponibilità e raggiungibilità)
- Mission Home
- Waypoint
- Add-on
Esito del Pre-check
Il sistema può rilevare due tipologie di errori:
Errori bloccanti
Riguardano Mission Unit o Home.
In questo caso non sarà possibile avviare la missione finché il problema non viene risolto.
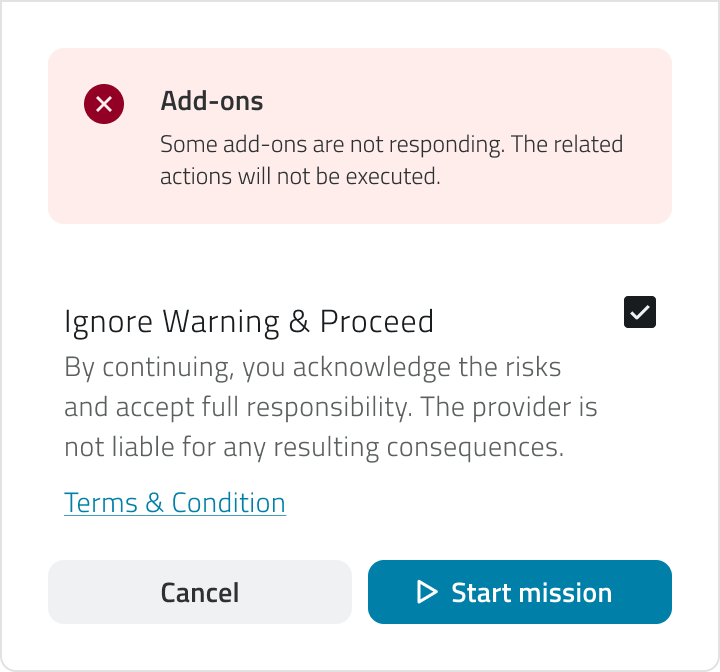
Errori non bloccanti
Riguardano Add-on o singoli Waypoint.
In questo caso è comunque possibile avviare la missione, ma il sistema richiede una conferma prima di procedere.
Avvio della missione
Cliccando Start Mission, la missione viene avviata.
All’avvio:
- Il Cane Robot entra in modalità autonoma.
- L’esecuzione procede in autonomia seguendo Home, Waypoint e azioni configurate.
Da questo momento è possibile monitorare la missione in tempo reale e intervenire tramite i controlli disponibili.
Collegamenti
Ultimo aggiornamento: 15 dicembre 2025