
Missione con Robot Dog
Il modulo Mission Planner permette di pianificare, gestire e monitorare missioni robotiche all’interno dei progetti.
Tutte le configurazioni di base sono preimpostate: l’utente non accede al Backoffice ma opera direttamente nel Frontoffice, dove può censire le risorse necessarie e pianificare le missioni robotiche.
Disponibile con il modulo `modulo-mission-planner` attivo nel progetto.
Configurazione iniziale (Global Lists)
![]()
Le Global Lists disponibili includono:
- Mission Units: rappresenta l'unità robotica (robot dog o drone).
- Add-on: accessori o sensori collegabili alla Mission Unit.
- Profiles: insieme di Add-on assegnabili ad un robot dog compatibile.
Creare una Mission Unit
1. Apri la Global List → Mission Units.
2. Clicca Nuova istanza.
3. Compila i seguenti campi obbligatori:
- Nome e serial number della Mission Unit.
- Model: selezionabile da elenco preimpostato.
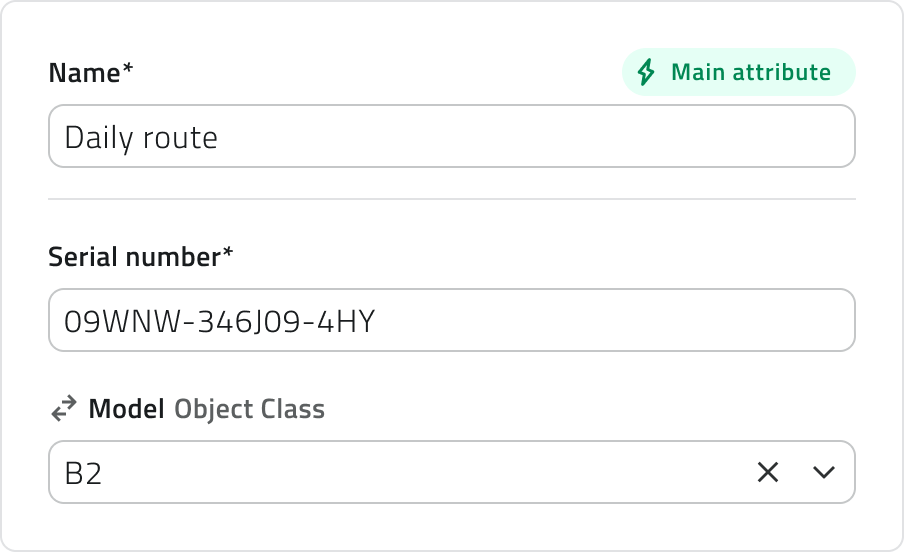
4. Salva la Mission Unit per renderla disponibile alla creazione dei profili.
💡 Il modello è già preconfigurato dal sistema e può essere scelto da un menu a tendina precompilato.
Censire Add-on
1. Apri la Global List → Add-ons.
2. Clicca Nuova istanza.
3. Inserisci i dati richiesti e seleziona il modello dell’Add-on dall’elenco preconfigurato da sistema.
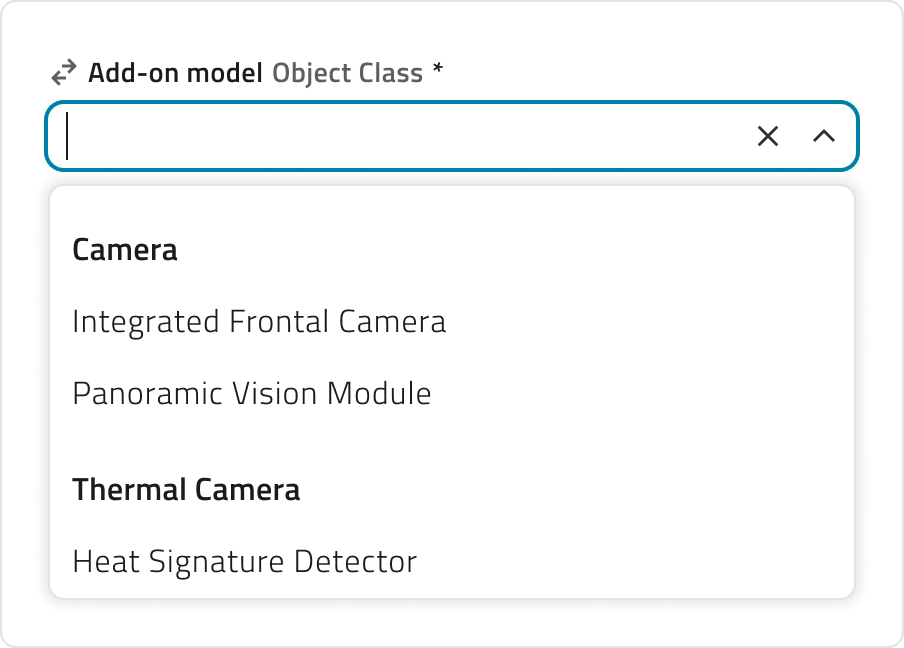
4. Salva per completare la registrazione.
💡 Gli Add-on possono essere telecamere, sensori o moduli accessori compatibili con la Mission Unit che sono stati precedentemente configurati da sistema.
Creare un Profilo
1. Apri la Global List → Profiles.
2. Clicca Nuova istanza.
3. Compila i seguenti campi obbligatori:
- Nome del profilo
- Robot dog model compatibile
- Add-on da associare al profilo (uno o più)
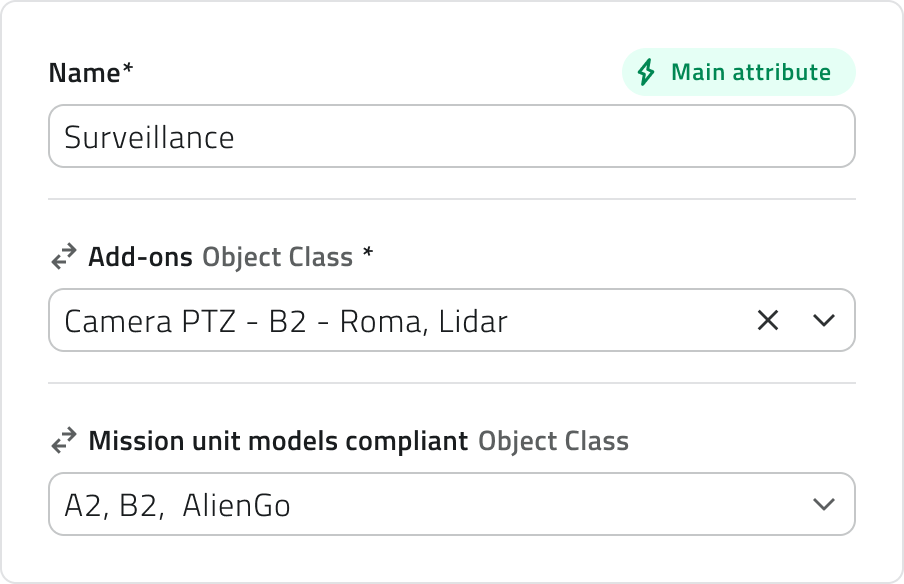
4. Salva per completare la creazione.
💡 Un profilo rappresenta la configurazione tecnica di un robot dog, comprendente tutti gli Add-on necessari per portare a termine determinate azioni durante una missione.
Missioni con Cani Robot
Questa sezione descrive i passaggi operativi per la creazione e gestione di missioni con Cani Robot, dalla creazione di un'istanza di missione alle opzioni di mission control.
Creare una nuova missione
1. Apri il progetto di interesse.
![]()
3. Fai clic sulla classe oggetto Mission per aprire la lista delle missioni.
4. Crea una nuova missione cliccando su Nuovo oggetto.
5. Si apre il modale di creazione missione, che guida l'utente nella configurazione iniziale.
-
Mission Name
Nome identificativo della missione. -
Mission Type
Tipologia di missione.Selezionando Land, il flusso operativo viene automaticamente adattato per missioni con cani robot.
-
Mission Unit
Selezione della Mission Unit associata (Robot Dog).
L'elenco è filtrato in base alle Mission Unit disponibili nel progetto.
6. Dopo aver compilato i campi obbligatori, clicca Save per creare la missione.
Modificare una missione
Per modificare una missione:
- Apri Inventory → Missions.
- Seleziona la missione desiderata.
- Clicca Edit.
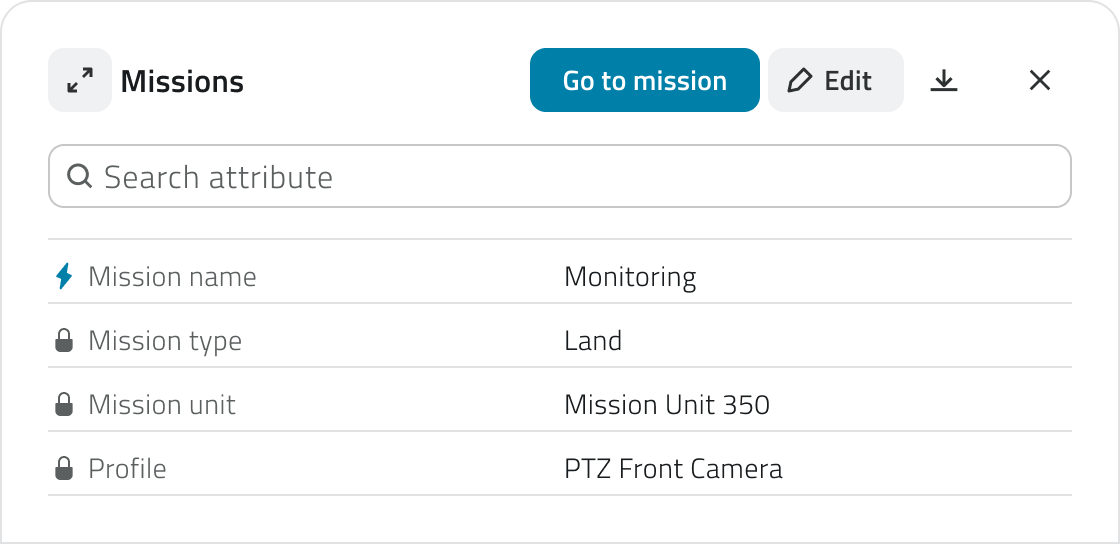
È possibile modificare:
- nome della missione
- Mission Unit associata (se compatibile)
- altri attributi non bloccati dallo stato della missione
💡 Se una missione include almeno un waypoint, dal pannello Attributi non sarà più possibile modificare Mission type, Mission Unit o Profile.
Eliminare una missione
Per eliminare una missione:
- Apri Inventory → Missions.
- Seleziona la missione da eliminare.
- Clicca Elimina.
- Conferma l’operazione nel modale di sicurezza.
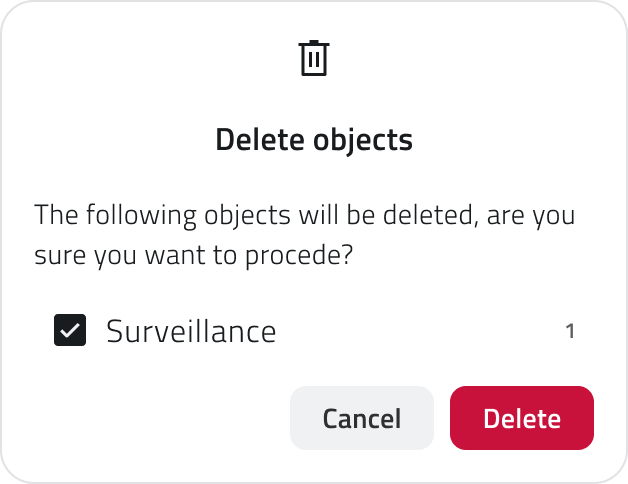
💡L'eliminazione è consentita solo per missioni non avviate. Le missioni archiviate non possono essere eliminate, ma solo consultate o duplicate