
Robot Dog – Creare e avviare una missione
Questa sezione descrive i passaggi operativi per creare, configurare e avviare una missione con Cani Robot, dalla creazione dell’istanza di missione fino al controllo e all’avvio tramite Mission Control.
Disponibile solo con modulo modulo-mission-planner attivo nel progetto e Mission Unit di tipo Robot Dog configurata.
Requisiti
- Modulo attivo nel progetto:
modulo-mission-planner - Accesso al Frontoffice
- Mission Unit di tipo Robot Dog disponibile nel progetto
- Almeno un Profilo configurato
Creare una nuova missione
- Apri il progetto di interesse
- Dalla Nav Rail, apri la sezione Inventory
![]()
- Clicca sulla classe oggetto Mission per visualizzare la lista delle missioni
- Clicca sul bottone Nuovo oggetto
![]()
- Si apre il modale di creazione missione, che guida nella configurazione iniziale
Compila i campi obbligatori:
-
Mission Name
-
Mission Type
-
Mission Unit
- Clicca Save per creare la missione
Gestire una missione (modifica ed eliminazione)
Le operazioni di modifica ed eliminazione sono disponibili dalla lista missioni.
- Apri Inventory → Missions
- Seleziona la missione desiderata
Modificare una missione
Clicca Edit per aggiornare i dati della missione.
È possibile modificare:
- Nome della missione
- Mission Unit associata (se compatibile)
- Altri attributi non bloccati dallo stato della missione
💡 Se una missione include almeno un Waypoint, dal pannello Attributi non è più possibile modificare Mission Type, Mission Unit o Profile.
Eliminare una missione
CliccaCon un clic seleziona la missione desiderata dall’elenco, quindi clicca su Elimina e conferma l’operazione nel modale diche sicurezza.appare.
💡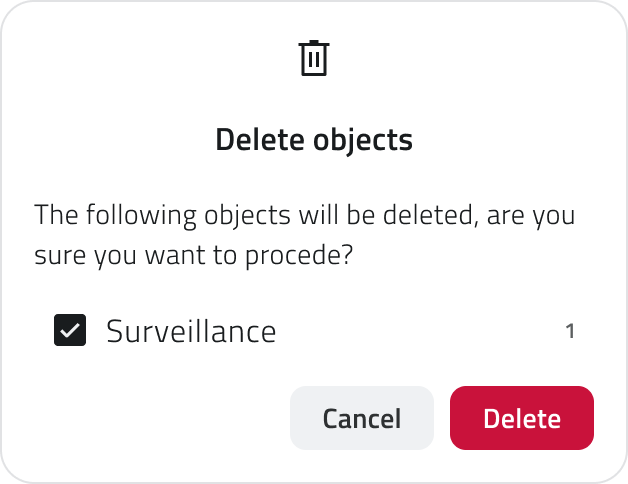
L’eliminazione è consentita solo per le missioni non avviate.
Le missioni archiviate non possono essere eliminate, ma solo consultate o duplicate.
Inserire Home e Waypoint in mappa
Per rendere una missione valida e avviabile, è necessario definire:
- una Mission Home
- almeno un Waypoint
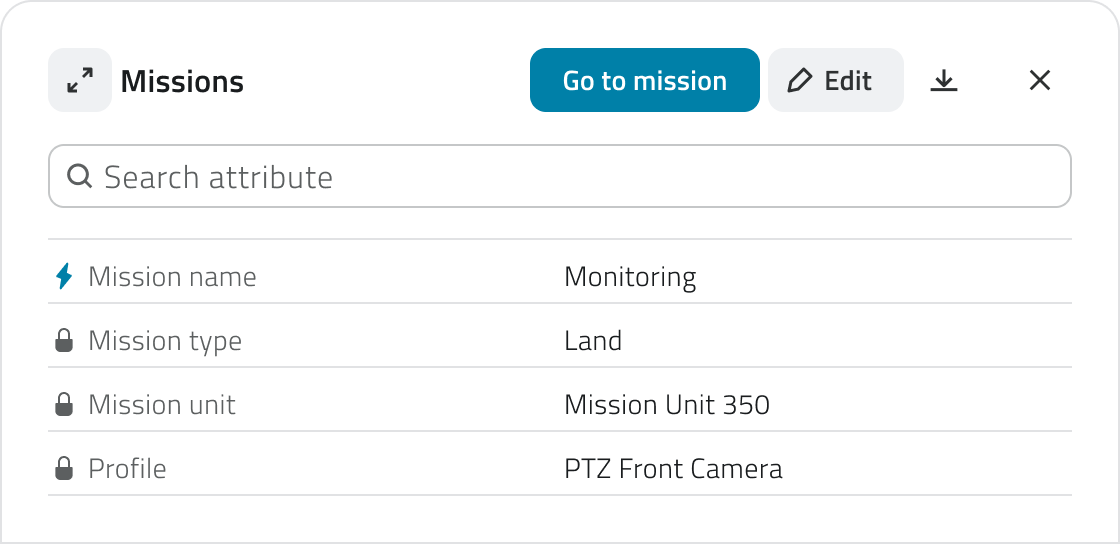
Apri Inventory → Missions, seleziona la missione con doppio clic e, dal pannello di dettaglio, clicca Go to Mission.
Impostare la Mission Home
La Mission Home rappresenta il punto di partenza e di rientro del Cane Robot.
La Home non viene disegnata manualmente sulla mappa, ma rilevata automaticamente dal sistema.
Per impostare la Home:
- Assicurati che il Robot Dog sia acceso e posizionato sulla charging station
- Dal pannello laterale, clicca Mark on map
- Il sistema registra la posizione corrente e la salva come Mission Home
💡 Per modificare la Home, elimina quella esistente e clicca nuovamente Mark on map.
Aggiungere Waypoint in mappa
I Waypoint definiscono il percorso operativo del Cane Robot durante la missione.
Per aggiungere un Waypoint:
- Seleziona lo strumento Disegna dalla toolbar
- Clicca sulla mappa per posizionare il punto
- Muovi il mouse per definire l’orientamento del Waypoint
- Clicca con il tasto destro del mouse per confermare l’inserimento
Ogni Waypoint:
- Viene numerato automaticamente
- Appare sia in mappa che nel pannello laterale
- Può essere riordinato tramite drag & drop dal pannello laterale
È possibile:
- Modificare l’orientamento selezionando il Waypoint e usando lo strumento Rotate
- Eliminare un Waypoint dal pannello laterale o direttamente dalla mappa
💡 I Waypoint posizionati in aree non valide della costmap non vengono salvati.
Impostare azioni sui Waypoint
Per ogni Waypoint è possibile configurare una o più azioni, che il Cane Robot esegue dopo aver raggiunto il punto.
Le azioni definiscono cosa deve fare il robot, con quale Add-on o per quanto tempo.
Logica delle azioni
- Le azioni sono associate a un singolo Waypoint
- Vengono eseguite in sequenza, nell’ordine configurato
- Un Waypoint può non avere azioni associate
- Per avviare la missione, almeno un Waypoint deve avere almeno un’azione configurata
- Le modifiche diventano effettive solo dopo aver cliccato Save
Tipologie di azioni disponibili
- Take Photo – acquisizione di un’immagine tramite Add-on selezionato
- Start Video / Stop Video – avvio e arresto di una registrazione video
- Wait – attesa per un intervallo di tempo definito
Per le azioni di acquisizione media è possibile associare uno o più modelli AI, che vengono eseguiti automaticamente dopo la raccolta del contenuto.
Al termine della missione è possibile visualizzare:
- Media originale
- Media elaborato dai modelli AI selezionati
Mission Control e avvio della missione
Dopo aver configurato Home, Waypoint e azioni, la missione può essere verificata e avviata.
Apri Inventory → Missions, seleziona la missione con doppio clic e clicca Go to Mission.
Mission Control (Pre-check)
All’apertura, il sistema esegue il Mission Control, che verifica:
- Mission Unit (disponibilità e raggiungibilità)
- Mission Home
- Waypoint
- Add-on
Esito del Pre-check
Il sistema può rilevare due tipologie di errori:
Errori bloccanti
Riguardano Mission Unit o Home.
La missione non può essere avviata e il bottone Start Mission rimane disabilitato.
Errori non bloccanti (warning)
Riguardano Add-on o singoli Waypoint.
Il bottone Start Mission è abilitato, ma viene richiesta una conferma prima di procedere.
Avvio della missione
Cliccando Start Mission, la missione viene avviata.
All’avvio:
- Il Cane Robot entra in modalità operativa
- L’esecuzione procede in autonomia seguendo Home, Waypoint e azioni configurate
Da questo momento è possibile monitorare la missione in tempo reale e intervenire tramite i controlli disponibili.
Ultimo aggiornamento: 15 dicembre 2025 e intervenire tramite i controlli disponibili.