
Robot Dog – Create and launch a mission
Questa sezione descrive i passaggi per creare, configurare e avviare una missione con un Robot Dog, dalla creazione della missione fino al controllo preliminare e all’avvio.
Disponibile solo con almeno una Mission Unit di tipo Robot Dog configurata, con un Profilo configurato e con permessi di accesso all'App.
Creare una nuova missione
1. Dalla pagina principale dei progetti, apri il progetto in cui vuoidesideri creare la missione.
2. Dalla nav rail laterale, apriaccedi laalla sezione Inventory.
![]()
3. Clicca sulla classe oggetto Missions per visualizzare la listal'elenco delle missioni.
4. Clicca su Nuovo oggettooggetto.
![]()
5. Si apreaprirà il modale di creazione missione, che guidache nellarichiede configurazionel'inserimento iniziale.
Inserisciseguenti i dati richiesti:dati:
-
Nome
NomeIl nome identificativo della missione. - Mission unit type
Selezione Robot Dog dall'elenco. - Start Mode
Scegli se lamissioonemissione devepartireessereinavviatamodo manuale,manualmente, tramite un comandodefinito,specifico, o in modo programmato.
- Se
scegliselezioni la modalità programmata, dovraiintserireancheancheindicare la data di iniziomissione.della missione.
- Se
-
Mission Typology
Definisce la modalità operativa della missione.È possibilePuoi scegliere tra:-
AutonomousAutonomous:–ilIl Robot Dog esegue la missionein autonomiaautonomamente, seguendo il percorso e le azioni che verranno configurati nei passaggi successivi. -
DiscoveryDiscovery:– missioneMissione esplorativa utilizzata per acquisire dati senza un percorso predefinito.
-
- Mission Unit
Seleziona ilrobotRobotdogDog che dovràeffettuareeseguire questa missione. - Profile
Seleziona il profilo per la missione. Questo camposidiventasbloccaattivo solo dopo aver selezionato la Mission Unit.
6. Per creare la missione, clicca Salva
GestireModifica unadelle missione (modifica ed eliminazione)missioni
Le operazioni di modifica ed eliminazione sono disponibili nell'inventory, dallanella lista delle missioni.
Modificare una missione
Per modificare una missiona,missione, apri il dettaglio cliccando sul bottone blu con l'icona di una freccia, che apparevisibile al passaggio del mouse sull'elemento.
Clicca Modifica perPer aggiornare i dati della missione.missione, clicca Modifica.
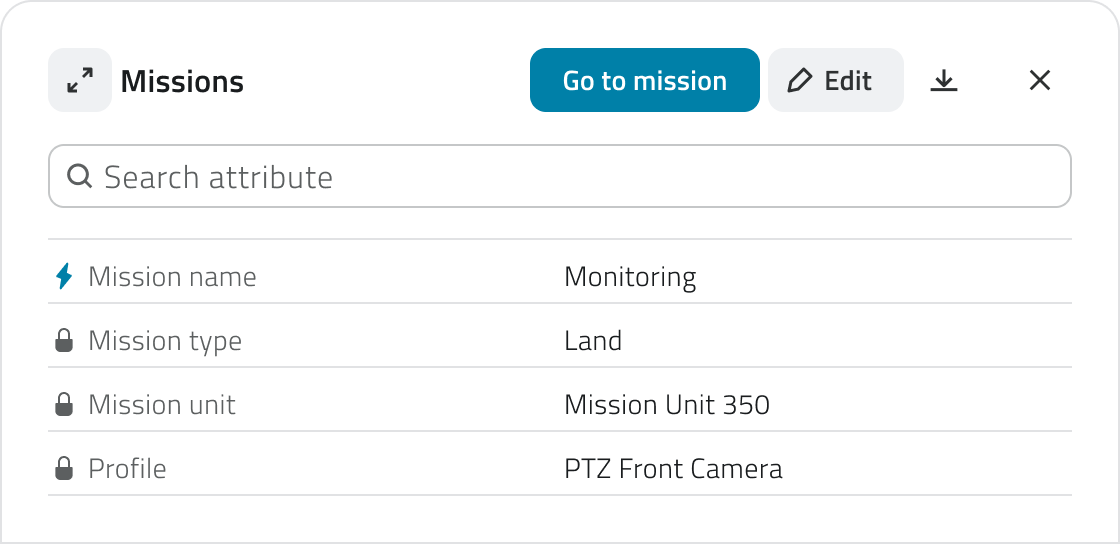
È possibile modificare alcuni attributi, in base allo stato della missione e alla presenza di Waypoint.
Eliminare una missione
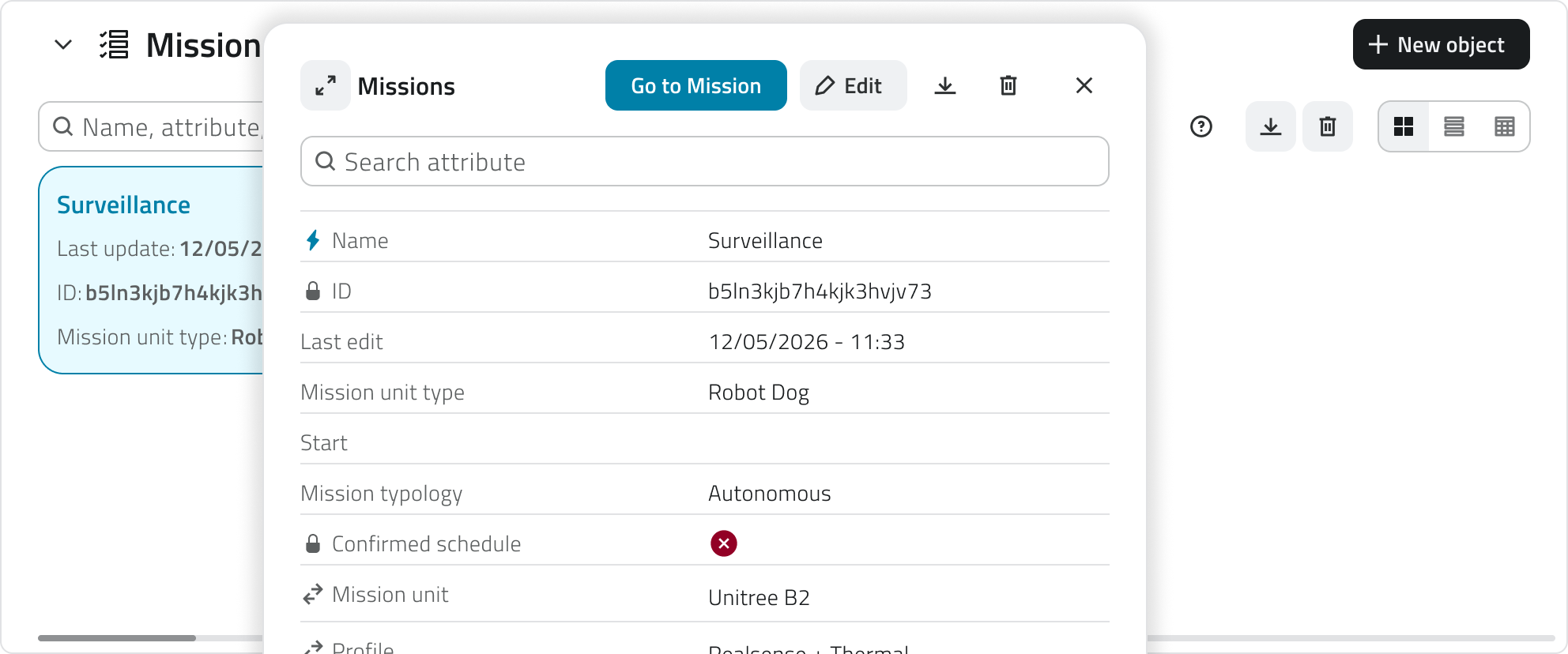
Per eliminare una missione puoi:missione:
AprireApri il dettaglio della missione eclioccareclicca sul bottone Elimina in alto a destra della finestra.SelezionareSeleziona una o più missioni dalla lista ecliccarecliccailsul bottone Elimina in alto a destra della vista.
In entrambi i casicasi, apparirà ununa modale che ti chiederàfinestra di confermareconferma per l'operazione.
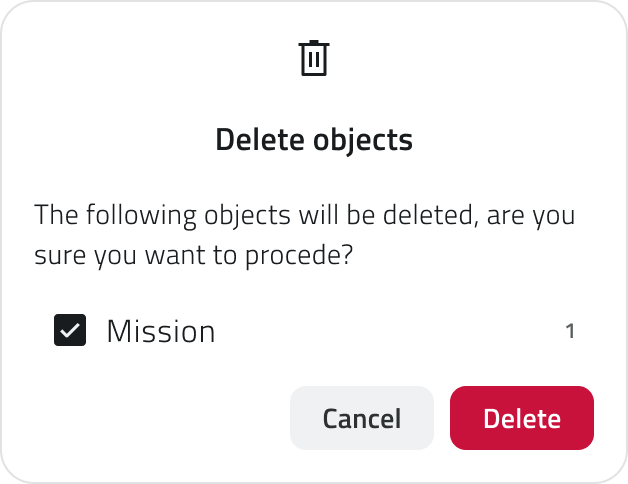
L’eliminazione è consentita solo per le missioni non avviate.
Le missioni archiviate non possono essere eliminate, ma solo consultate o duplicate.
Inserire elementi in mappa
Per rendere una missione valida e avviabile,operativa, è necessario definire una Mission Home e almeno un Waypoint. È anche possibile disegnare aree di Danger Zone e Geofence.
Per inserirli clicca Go to Mission dal pannello di dettaglio della missione.
Aggiungere Danger Zones e Geofence
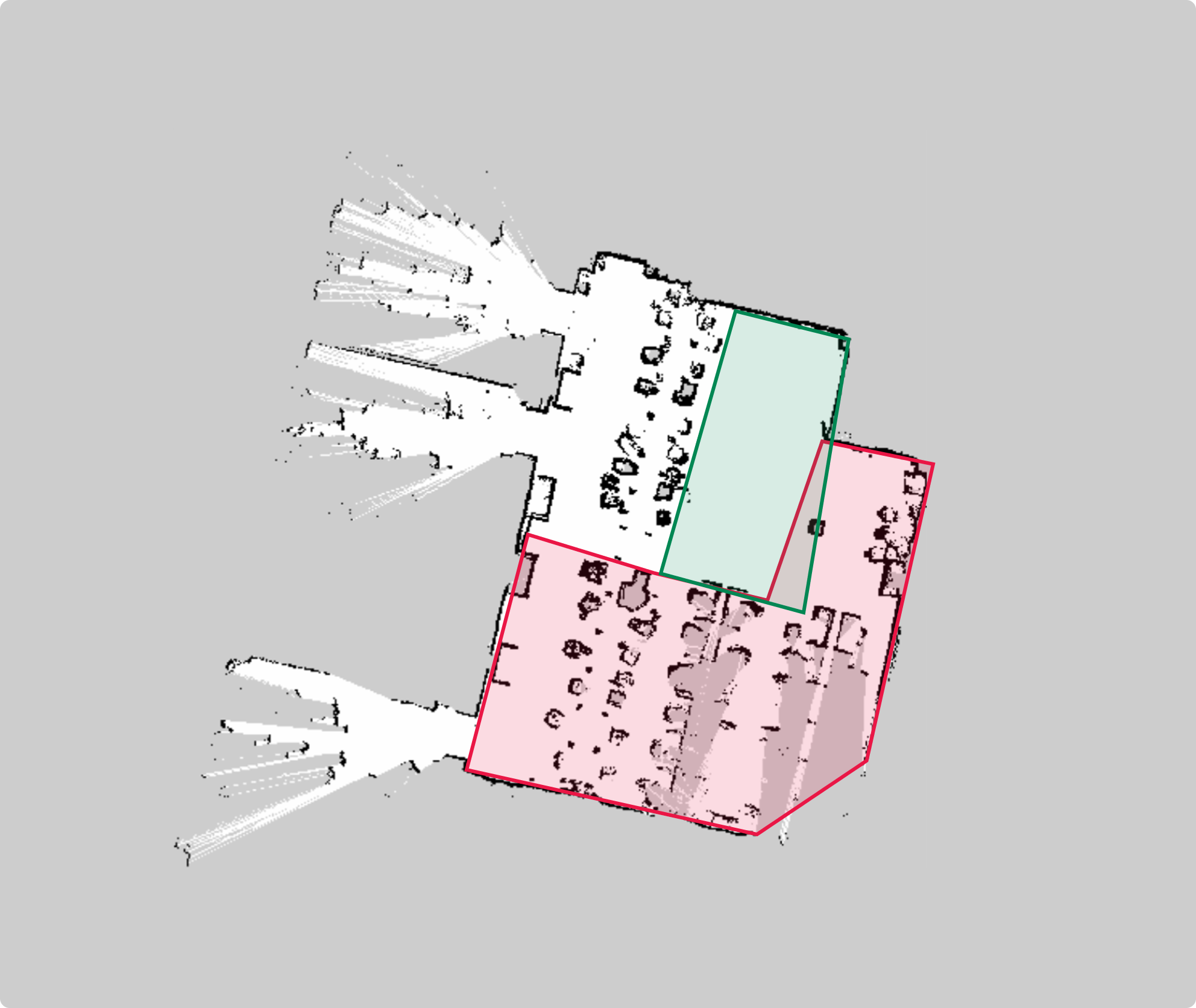
Le Danger Zones e i Geofences sono zone che limitano l'area operativa del Robot Dog.
- Danger Zone
Rappresenta un'area nella quale il RobotdogDog non può entrare. - Geofence
Rappresenta un'area nella quale il Robot Dog può operare in modo sicuro. Il robot può uscire da quest'areaarea, ma verrai notificato se lo farà.
Per aggiungere una Danger Zone o un Geofence, seleziona lo strumento Disegna dalla toolbar e selezion ascegli la Classe Oggetto corrispondente.

Per disegnare il poligono, posiziona i vertici cliccando il tasto sinistro del mouse sulla mappa.
Chiudi il poligono cliccando il tasto destro del mouse.
Compila gli attributi richiesti e clicca su Salva.
Impostare la Mission Home
La Mission Home rappresenta il punto di partenza e di rientro del Robot Dog.
Non viene disegnata manualmente sulla mappa, ma viene rilevata automaticamente dal sistema in base alla posizione del robot.
Prima di impostare la HomeHome, assicurati che il Robot Dog sia acceso e posizionato sulla charging station.
Dal pannello laterale, clcca Segna posizione.
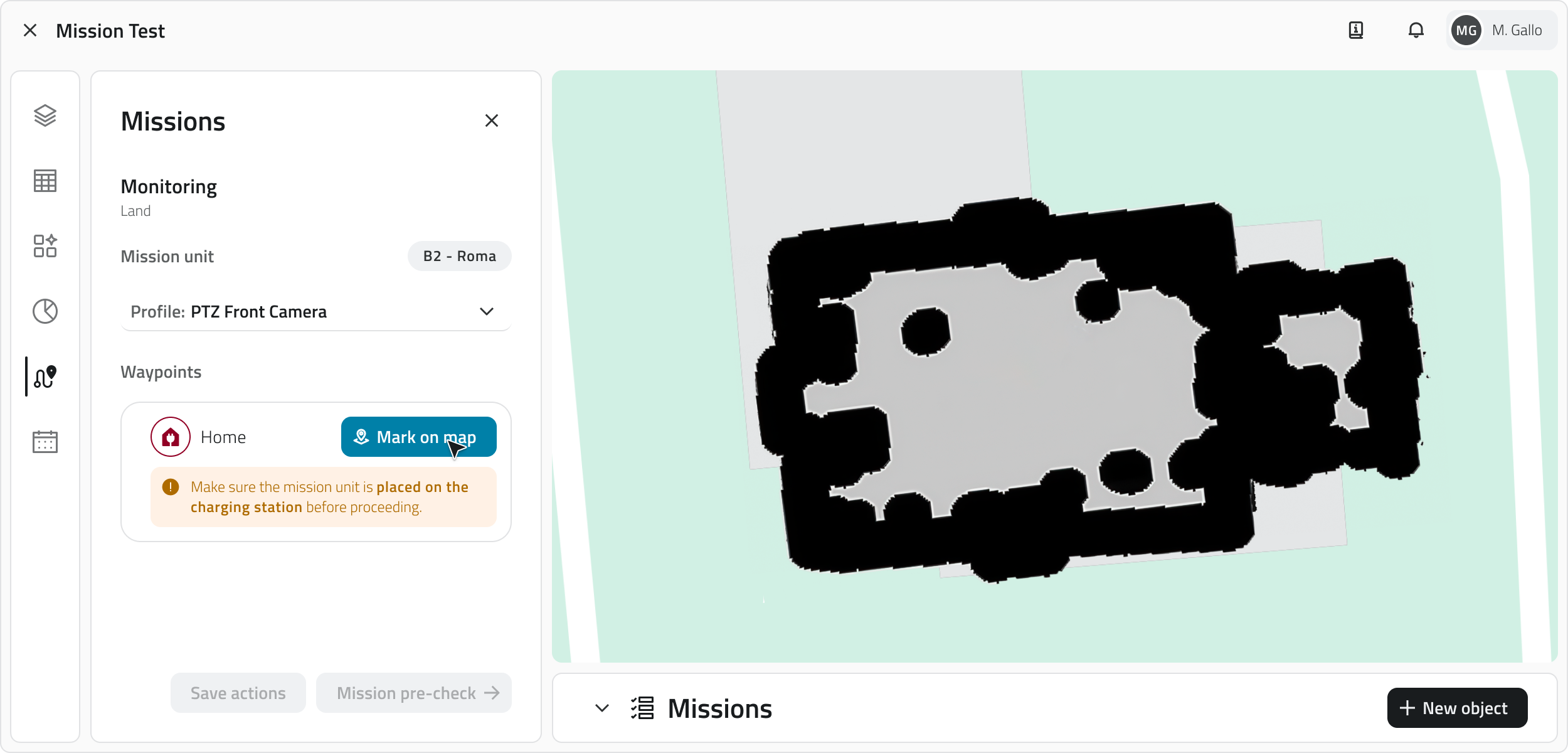
Il sistema registra la posizione corrente del robot e la salva come Mission Home.
Per modificare la Home,Home, elimina quella esistente e clicca nuovamente Segna posizione.
Puoi posizionare la Home all'interno di una Danger ZoneZone, ma in fase di verifica sarà considerato un errore bloccante.bloccante.
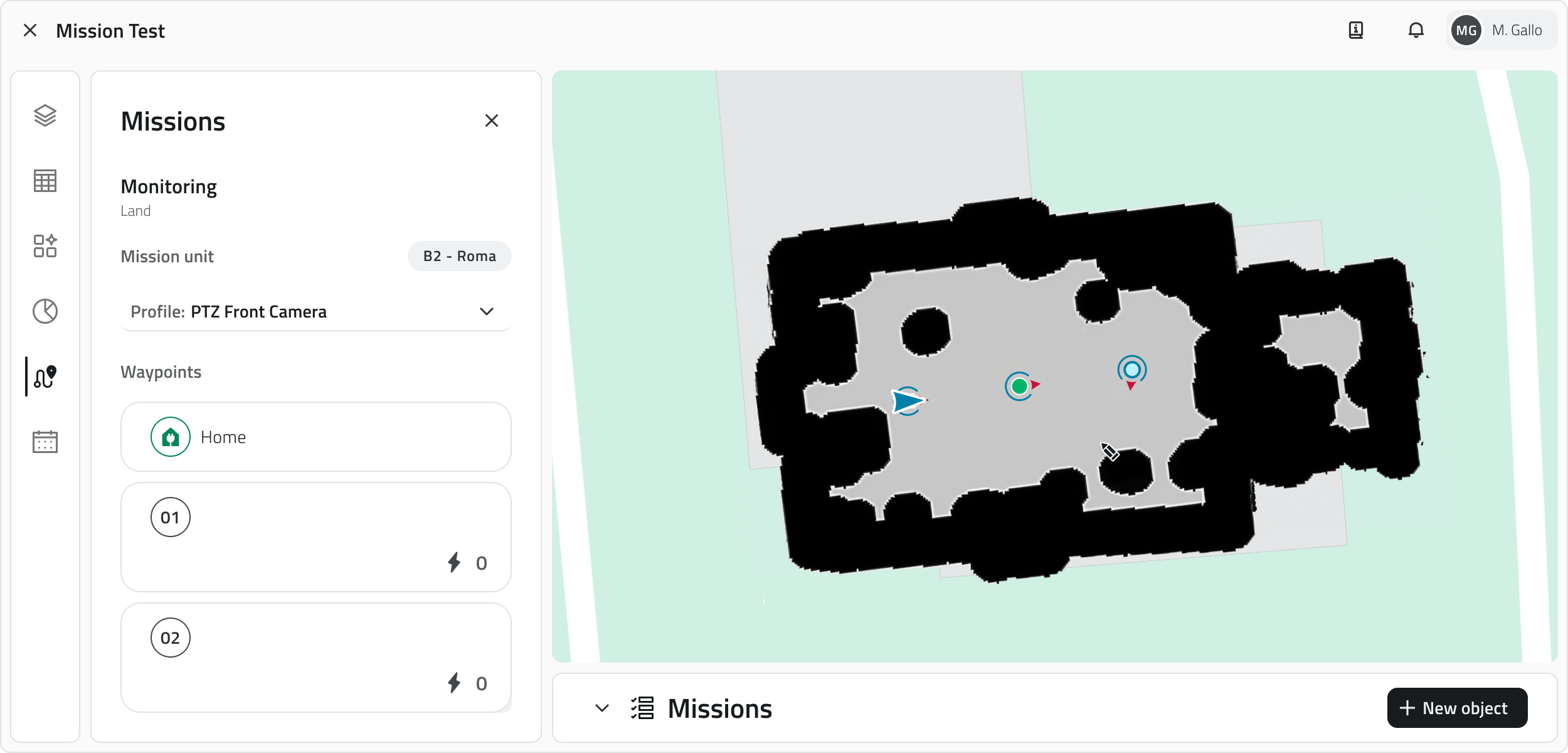
Aggiungere Waypoint in mappa
I Waypoint definiscono il percorso operativo che il Robot Dog seguirà durante la missione.
Per aggiungere un Waypoint seleziona lo strumento Disegna dalla toolbar.toolbar e scegli la Classe Oggetto corrispondente.
Per posizionare il punto, clicca con il tasto sinistro del mouse sulla mappa.
Per definire l’orientamento del Waypoint, muovi il mouse.
Per confermare l’inserimento, clicca con il tasto destro del mouse.
Puoi posizionare i WaypointsWaypoint all'interno di una Danger ZoneZone, ma in fase di verifica saranno scartati dalla traiettoria del robot.robot.
I WaypointsWaypoint sono visibili sia in mappa che che nell'elencateelenco nel pannello laterale. Ogni Waypoint viene numerato automaticamente, in base all'ordine di creazione. L'ordine dei waypointsWaypoint indica anche l'ordine in cui il robotRobot dogDog li raggiungerà.
Per cambiare l'ordine dei waypoints,Waypoint, clicca e trascinali nell'elenco del pannello laterale.
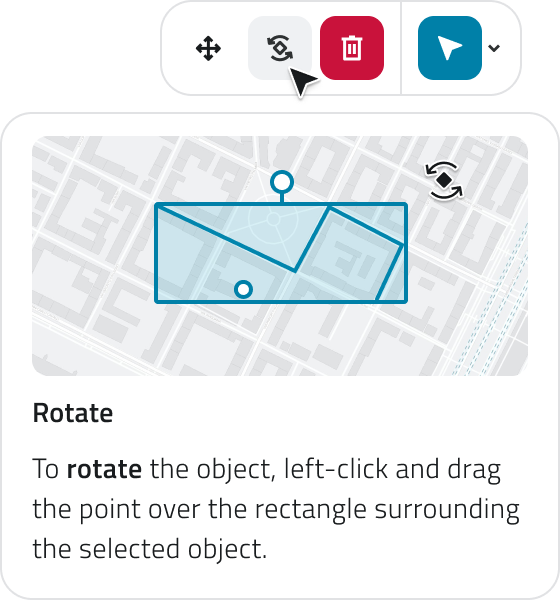
È inoltre possibilePer modificare l’orientamento selezionandoseleziona ilun Waypoint in mappa e usando lo strumentoclicca Ruota.Ruota dalla toolbar.
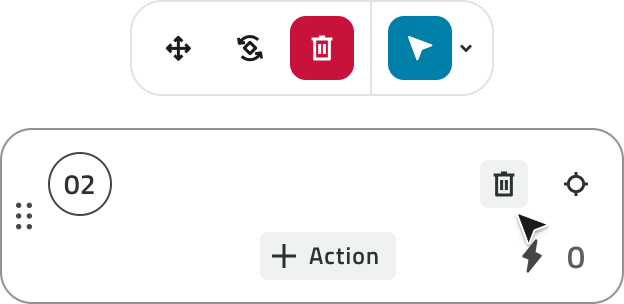
Per eliminare un Waypoint clicca su Elimina che appare andando in hover sull'elemento dell'elenco, o seleziona un waypoint in mappa e clicca Elimina dalla toolbar.
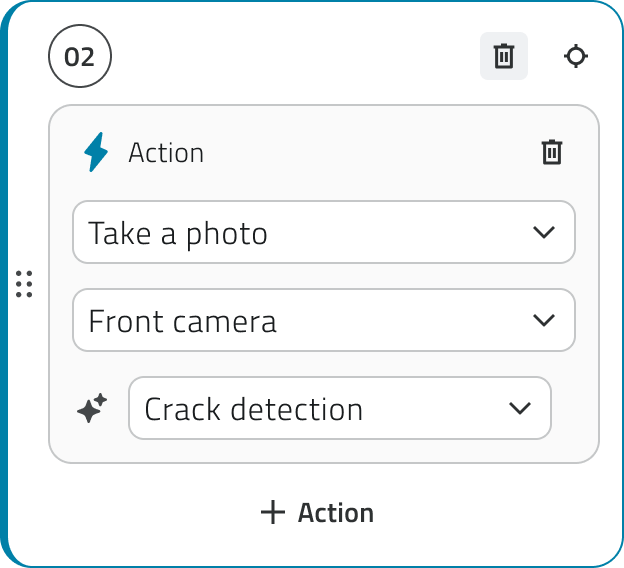
Impostare azioni sui Waypoint
Per ogni Waypoint è possibile configurare una o più azioni, che il Robot Dog esegue dopo aver raggiunto il punto.
Le azioni definiscono quale operazione deve eseguire il robot, utilizzando uno specifico Add-on oppure per una durata definita.
Per aggiungere un’azione a un Waypoint, porta il cursore sopra una delle card azione nel pannello laterale sinistro e clicca sul bottone +Action che appare..

Le azioni disponibili in piattaforma sono:
- Aspetta
Mantiene il robot in attesa per un intervallo di tempo che puoi definire dal campo successivo. - Body height
Consente di modificare l'altezza del robot facendolo abbassare ed alzare entro un range. - Tilt
Consente di modificare l'inclinazione del corpo del robot facendolo oscillare ain avanti e indietro entro un range. - Scatta foto
Acquisisce un'immagine utilizzando uno specifico Add-on che puoi definire dal capo successivo. - Inizia registrazione Video
Inizia a registrare un video utilizzando uno specifico Add-on che puoi definire dal capo successivo. - Termina registrazione Video
Interrompe la registrazione di un video di uno specifico Add-on che puoi definire dal capo successivo.
La lista delle azioni disponibili può variare in base agli Add-on in uso. Ad esempio se nel profilo utilizzato non sono presenti fotocamere, non sarà possibile selezionare Scatta foto come azione.
Per le azioni di acquisizione media è possibile associare uno o più modelli AI, che vengono eseguiti automaticamente dopo la raccolta del contenuto.
Al termine della missione vengono visualizzati:
-
Media originale
-
Media elaborato dai modelli AI selezionati
Per ogni waypoint è possibile aggiungere più azioni, ma è anche possibile salvare senza aver impostato alcuna azione.
Le azioni vengono eseguite in sequenza, nell’ordine in cui sono state create e in cui sono visibili nella lista.
Per salvare la configurazione dei waypoint e delle azioni, clicca sul bottone Salva, in basso.
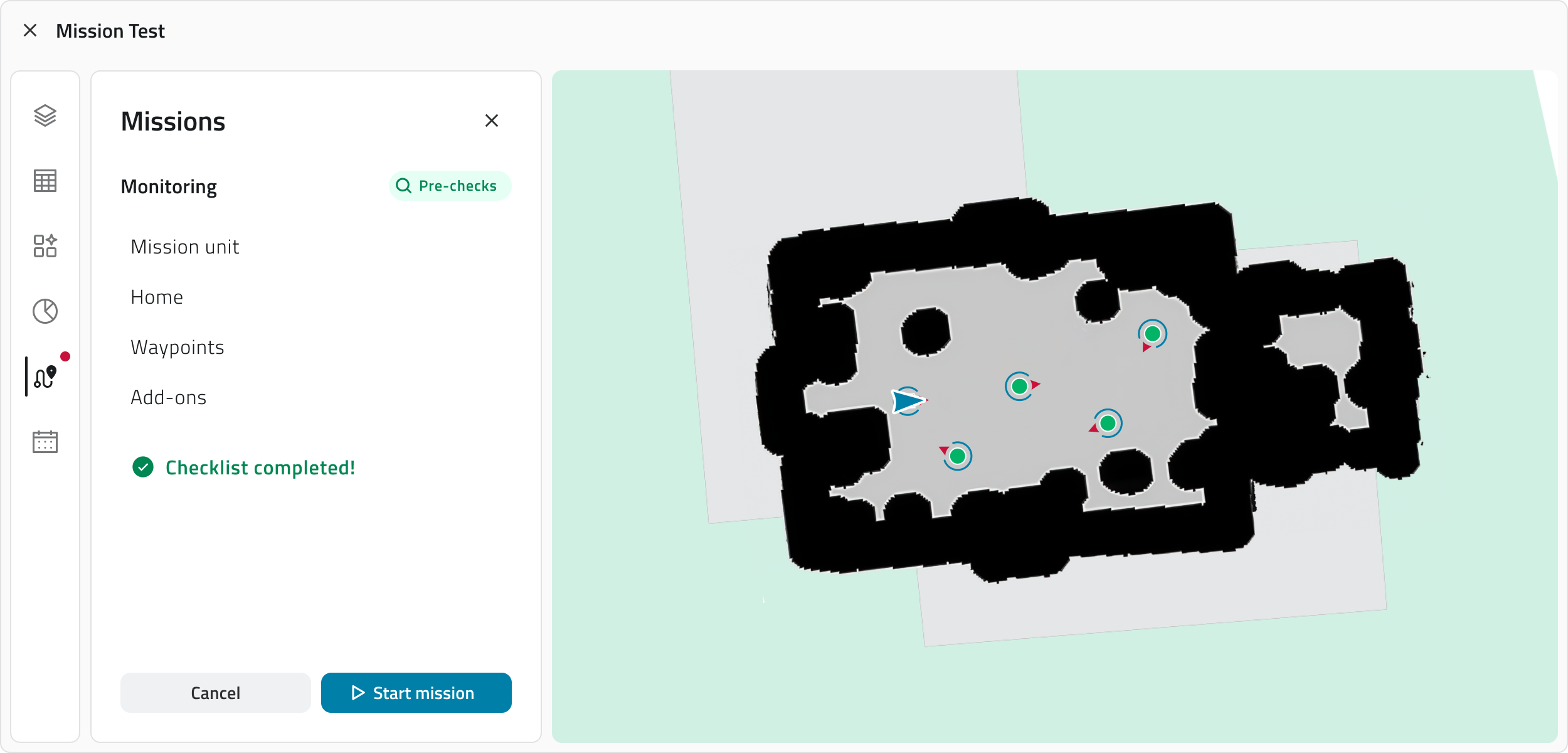
Controlli pre-missione
Prima di avvire la missione è necessario effettuare un pre-check.
Cliccando su Controlli pre-missione il sistema effettuerà una verifica sullo stato di connessione del Robot dog e sulla posizione della Home e dei Waypoints.
Il sistema può rilevare due tipologie di errori:
Errori bloccanti
Riguardano Mission Unit o Home.
In questo caso non sarà possibile avviare la missione finché il problema non viene risolto.
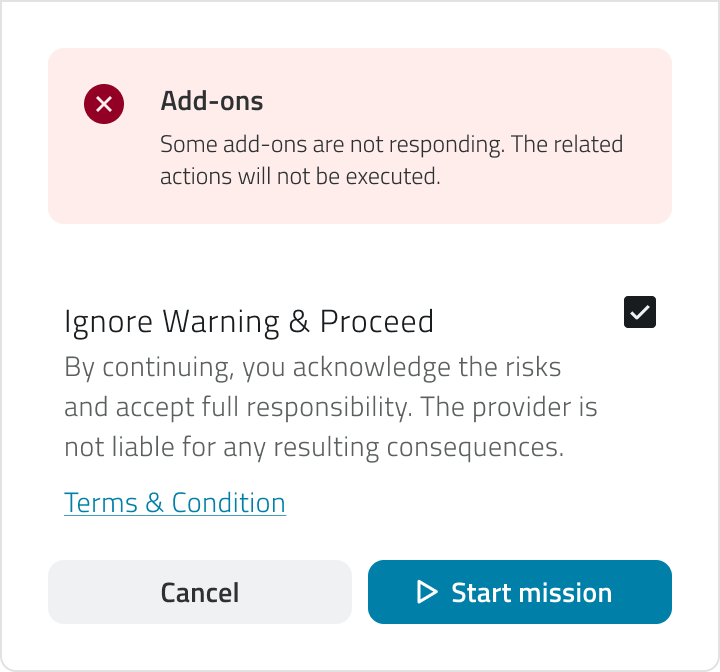
Errori non bloccanti
Riguardano Add-on o singoli Waypoint.
In questo caso è comunque possibile avviare la missione, ma il sistema richiede una conferma prima di procedere.
Ogni volta che riaprirai la missione verrà effettuato un controllo automatico sullo stato di connessione del Robot Dog. Inoltre ogni volta la Home dovrà essere re impostata e dovrà essere ri effettuato il Controllo pre-missione.
Avvio della missione
Se la verifica non ha presentato errori bloccanti, puoi avviare la missione cliccando il bottone Inizia la missione.
All’avvio il Robot Dog parte in autonomia e inizia ad eseguire il percorso e le azioni configurate per la missione.
Da questo momento è possibile monitorare la missione in tempo reale e intervenire tramite i controlli disponibili.
Collegamenti
Last update: 13 May 2026