
Robot Dog - Tracking a live mission
![]() English version
English version
![]() Italian version
Italian version
Dopo l'avvio, la missione entra in modalità live.
Da questo momento è possibile monitorare lo stato della missione in tempo reale e intervenire tramite i controlli disponibili nel pannello Missions.
Disponibile solo con permessi di accesso all'App e il pre-check della missione completato con esito positivo.
Modalità di controllo della missione
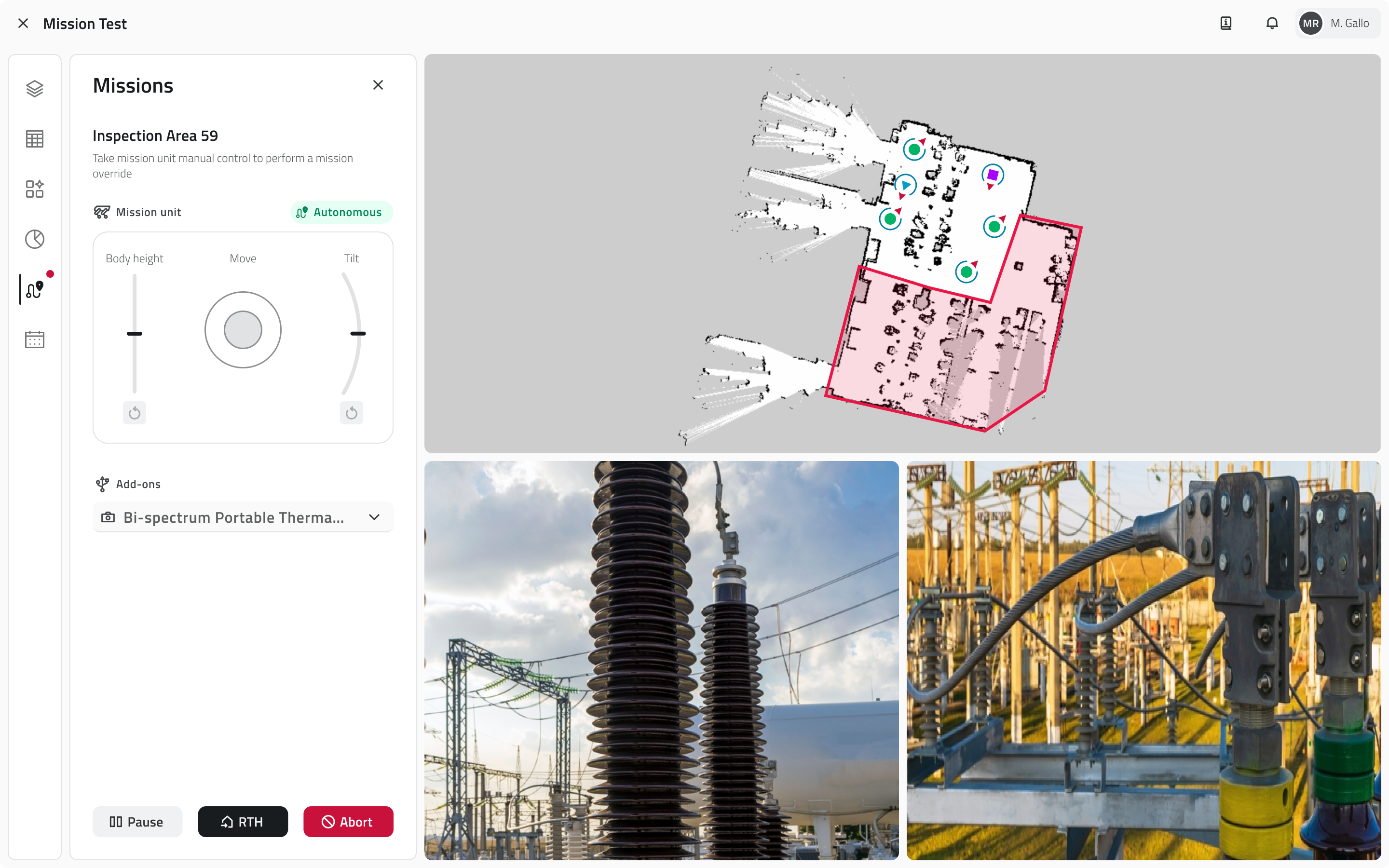
Durante l'esecuzione viene sempre mostrato lo stato corrente della missione.
È possibile seguire la missione in modalità autonoma o gestirla in modalità controllo manuale.
Modalità autonoma
In modalità autonoma il Robot Dog esegue la missione automaticamente, seguendo la sequenza di waypoint e azioni configurate durante la pianificazione.
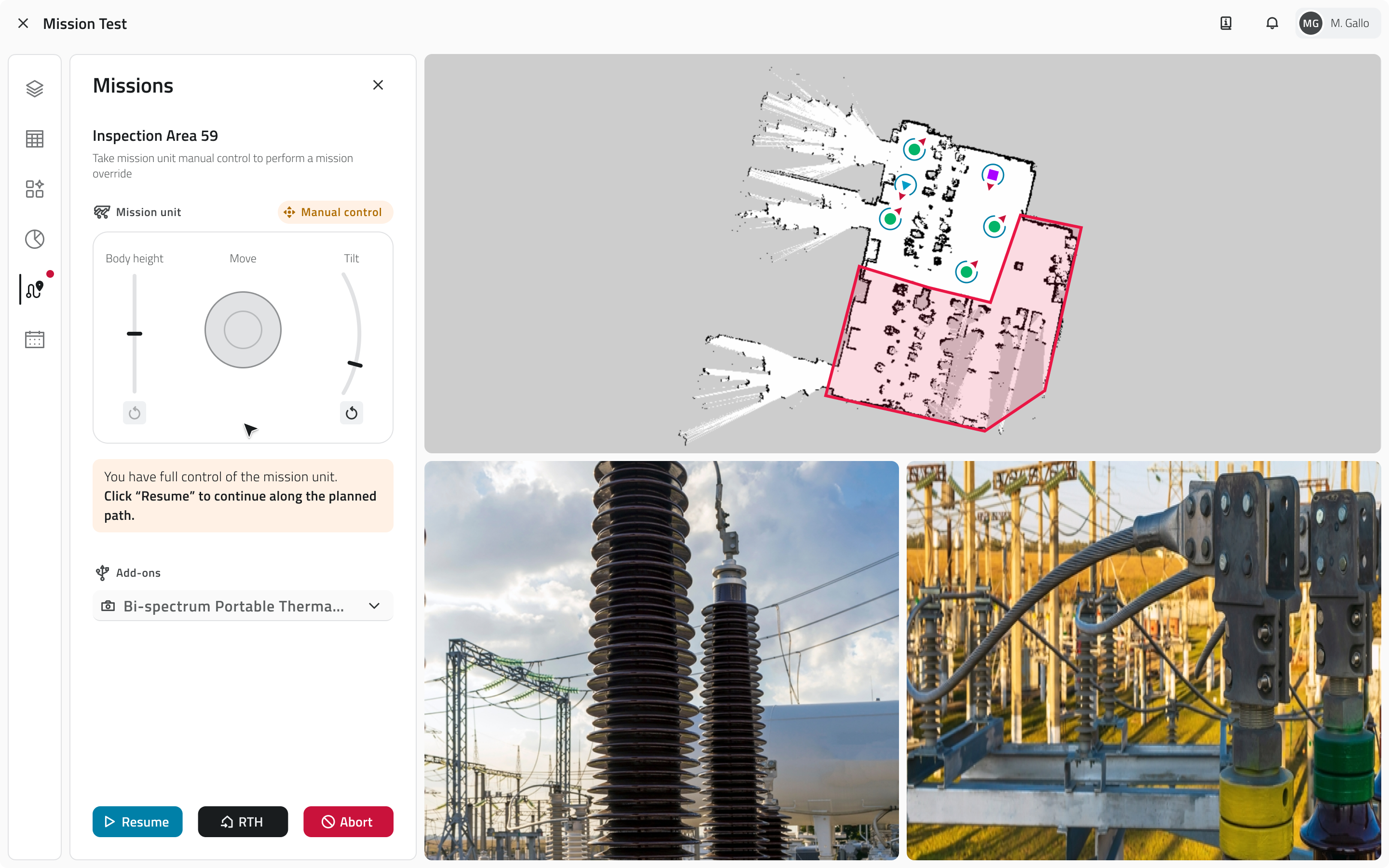
Modalità controllo manuale
Per passare alla modalità di controllo manuale sono disponibili due opzioni:
- Cliccare il bottone Pausa, situato nella parte bassa del pannello laterale.
- Utilizzare direttamente i comandi manuali nella parte alta del pannello laterale.
La piattaforma mostra un avviso che segnala il cambio di modalità. L'esecuzione autonoma viene sospesa e la Mission Unit risponde esclusivamente ai comandi impartiti in tempo reale.
I controlli di movimento disponibili sono:
Dog Movement
Direziona lo spostamento del Robot Dog.
Body height
Regola l'altezza del corpo del robot.
Tilt
Regola l’inclinazione anteriore-posteriore del corpo.
Modificando il Tilt, il controllo di movimento si disabilita. È ancora possibile modificare la Body height, ma il Robot Dog non può spostarsi finché il Tilt non viene riportato al valore di default.
Per tornare alla modalità autonoma, clicca il bottone Riprendi, che sostituisce il bottone Pausa nella parte bassa del pannello laterale.
In entrambe le modalità, accanto al bottone Pausa/Riprendi, sono sempre disponibili due comandi essenziali:
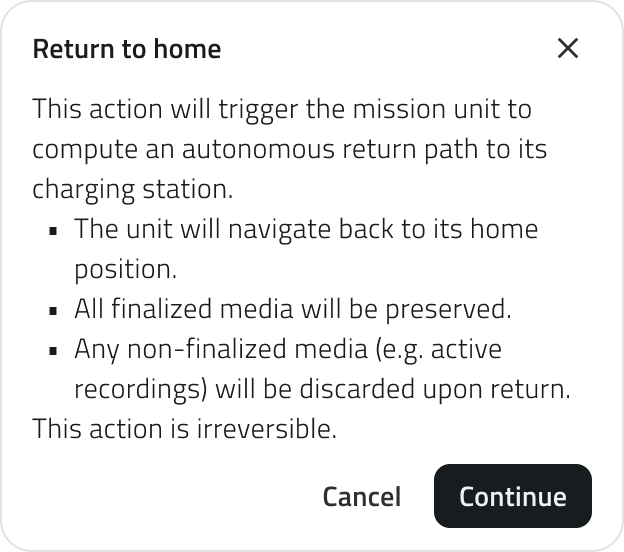
- RTH (Return to Home)
Conclude la missione e fa rientrare automaticamente il Robot Dog alla Mission Home.
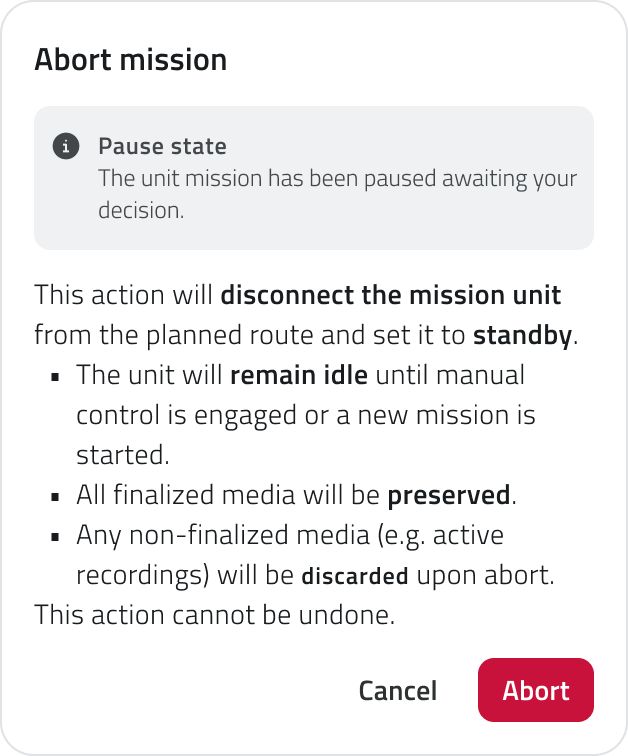
- Abort
Interrompe la missione lasciando il robot nella posizione in cui si trova.
Controlli camera PTZ e azioni standalone
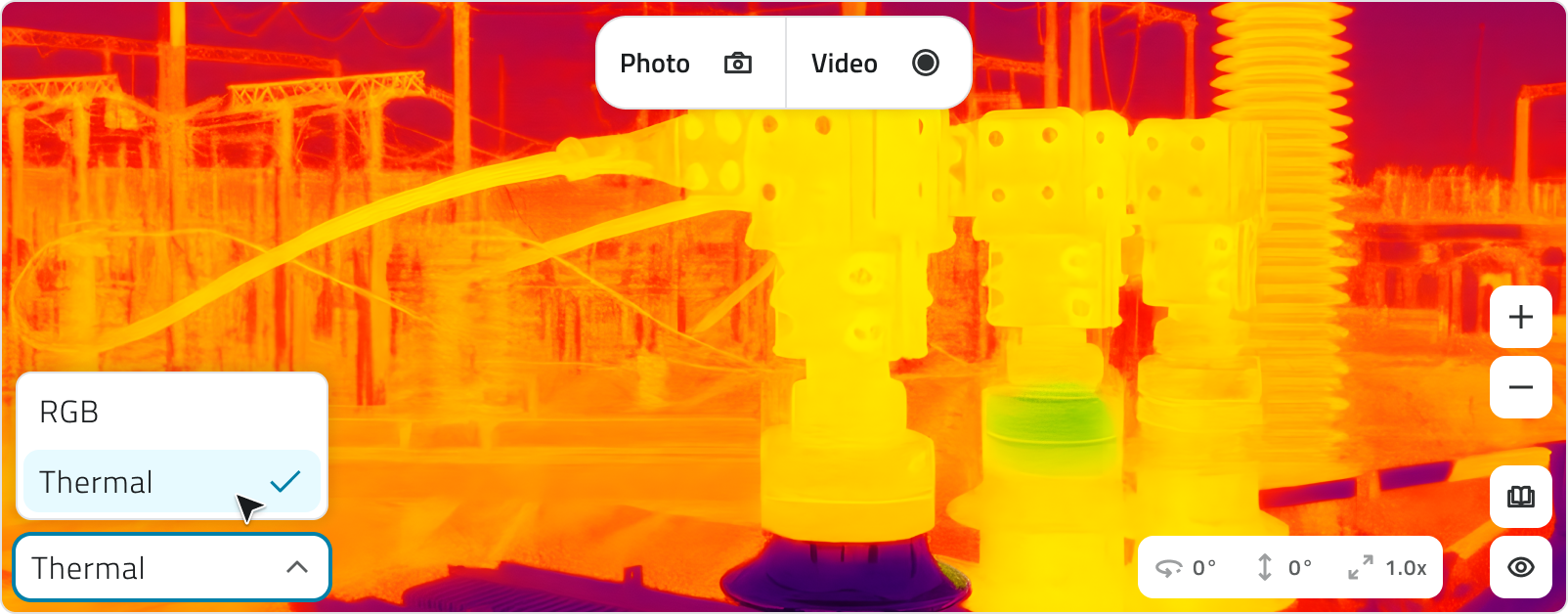
Se la camera PTZ è installata, durante la missione live è possibile controllarla manualmente sui tre assi:
- Pan
Rotazione orizzontale della camera. - Tilt
Inclinazione verticale. - Zoom
Ingrandimento o riduzione dell'immagine.
Per accedere ai controlli PTZ, seleziona l'add-on desiderato dal pannello laterale. Il componente dedicato verrà visualizzato automaticamente.
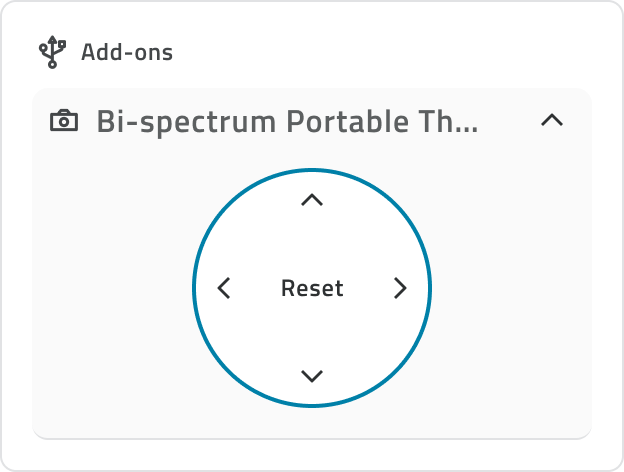
Utilizzando le frecce direzionali puoi orientare la camera nella direzione desiderata. Il bottone Reset, visibile solo dopo una modifica rispetto alla posizione iniziale, riporta la camera ai valori di default:
- Pan/Tilt: 0°
- Zoom: 1x
I valori correnti di Pan, Tilt e Zoom sono visualizzabili in hover sulla vista della camera.

I controlli PTZ sono disponibili sia in modalità autonoma sia in modalità controllo manuale.
Durante l'esecuzione della missione è inoltre possibile eseguire azioni camera indipendenti da quelle configurate sui Waypoint.
Per eseguire un'azione, porta il cursore sopra la vista della camera. In alto nella pagina compare una toolbar contestuale con le azioni disponibili:
- Photo
Acquisisce un'immagine. - Video
Avvia o interrompe una registrazione video.
Le azioni camera standalone non modificano la configurazione della missione e non influiscono sui Waypoint pianificati.
Gestione dei media
Durante l’esecuzione live, tutti i media acquisiti vengono salvati automaticamente.
I media acquisiti durante l'esecuzione di un Waypoint sono consultabili nel corrispondente Waypoint (Archiviato) al termine della missione.
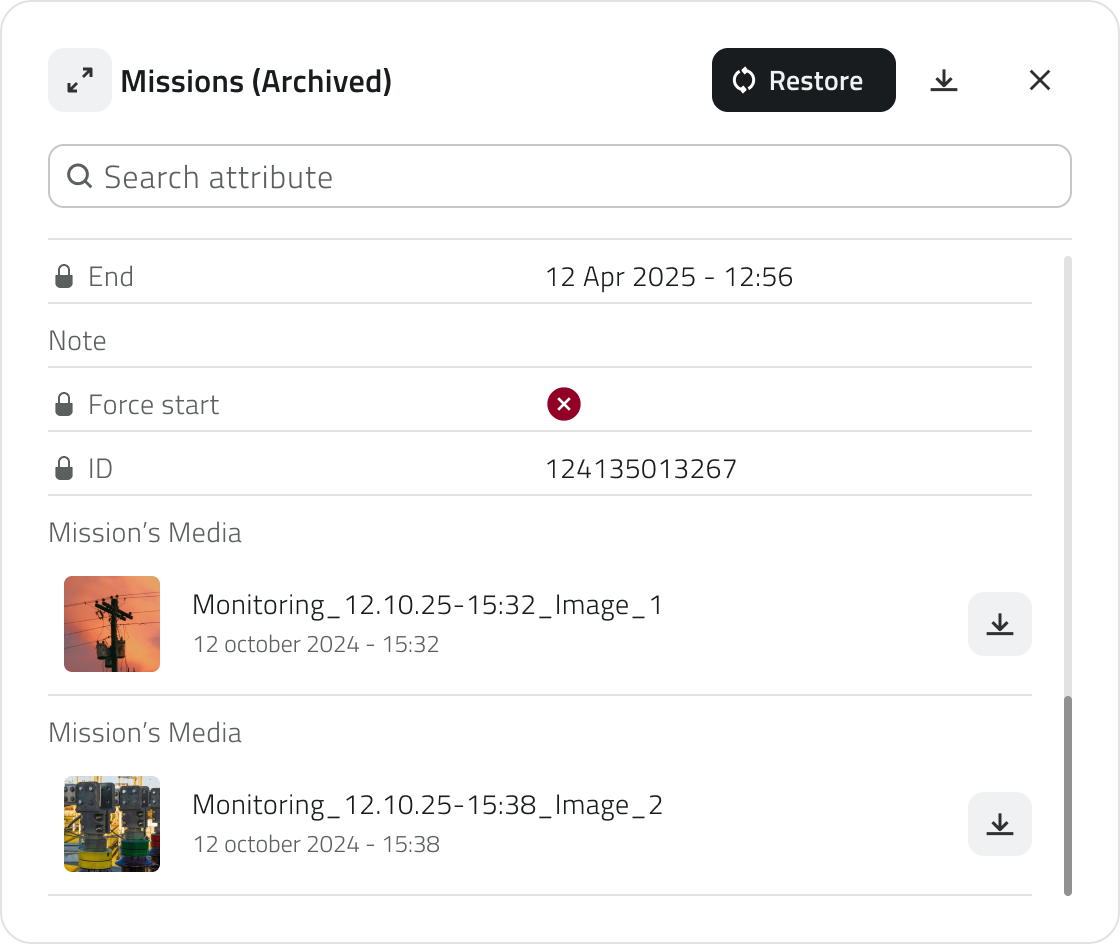
I media acquisiti al di fuori dei Waypoint, tramite azioni camera standalone (foto o video), vengono salvati nella sezione Mission (Archived).
Collegamenti
Last update: 15 May 2026