
Configurazione
Il modulo Mission Planner permette di pianificare, gestire e monitorare missioni robotiche all’interno dei progetti.
Tutte le configurazioni di base sono preimpostate: l’utente non accede al Backoffice ma opera direttamente nel Frontoffice, dove può censire le risorse necessarie e pianificare le missioni robotiche.
Disponibile con il modulo `modulo-mission-planner` attivo nel progetto.
Configurazione iniziale (Global Lists)
![]()
Le Global Lists disponibili includono:
- Mission Units: rappresenta l'unità robotica (robot dog o drone).
- Add-on: accessori o sensori collegabili alla Mission Unit.
- Profiles: insieme di Add-on assegnabili ad un robot dog compatibile.
Creare una Mission Unit
1. Apri la Global List → Mission Units.
2. Clicca Nuova istanza.
3. Compila i seguenti campi obbligatori:
- Nome e serial number della Mission Unit.
- Model: selezionabile da elenco preimpostato.
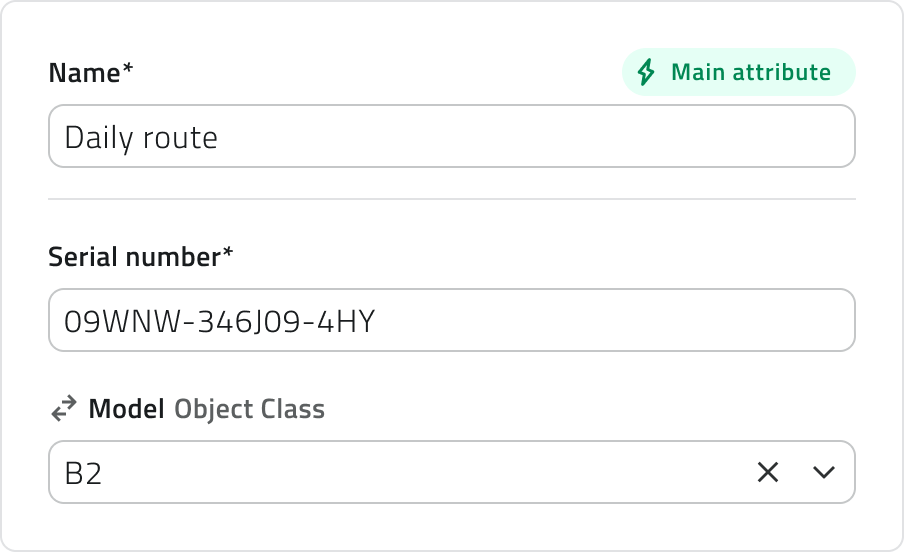
4. Salva la Mission Unit per renderla disponibile alla creazione dei profili.
💡 Il modello è già preconfigurato dal sistema e può essere scelto da un menu a tendina precompilato.
Censire Add-on
1. Apri la Global List → Add-ons.
2. Clicca Nuova istanza.
3. Inserisci i dati richiesti e seleziona il modello dell’Add-on dall’elenco preconfigurato da sistema.
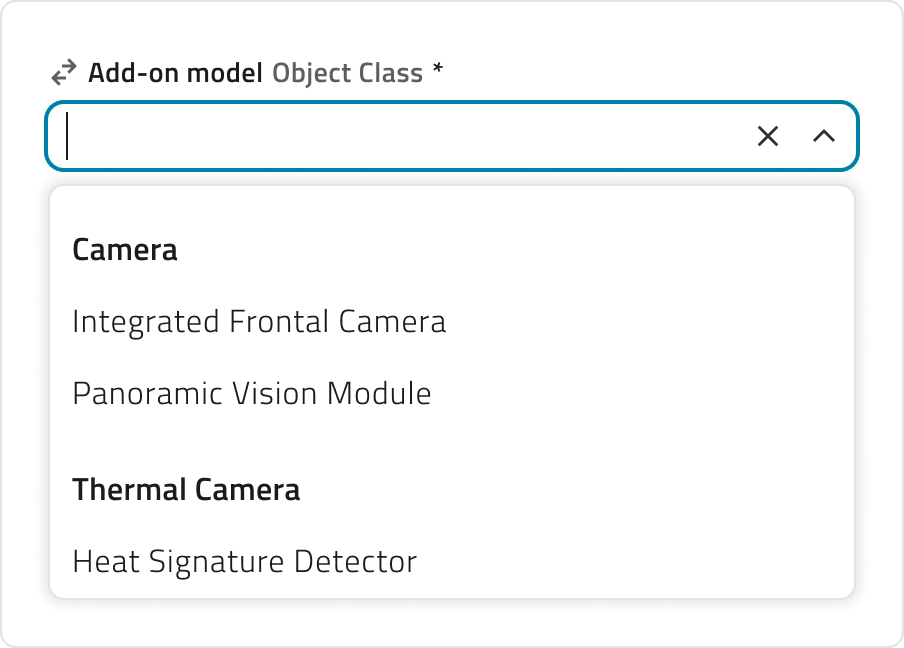
4. Salva per completare la registrazione.
💡 Gli Add-on possono essere telecamere, sensori o moduli accessori compatibili con la Mission Unit che sono stati precedentemente configurati da sistema.
Creare un Profilo
1. Apri la Global List → Profiles.
2. Clicca Nuova istanza.
3. Compila i seguenti campi obbligatori:
- Nome del profilo
- Robot dog model compatibile
- Add-on da associare al profilo (uno o più)
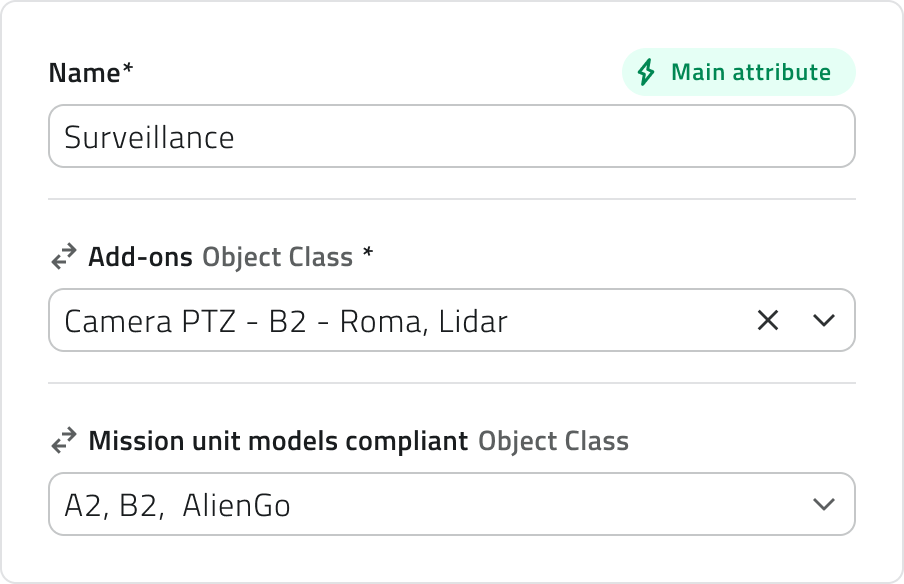
4. Salva per completare la creazione.
💡 Un profilo rappresenta la configurazione tecnica di un robot dog, comprendente tutti gli Add-on necessari per portare a termine determinate azioni durante una missione.
No comments to display
No comments to display